
To download the app, visit: Library
:::この記事では、チューリップアプリを使ってユニバーサルロボット(UR)からデータを収集する方法を説明します。
目的
自動化ソリューションは、産業界でますます普及しています。 そのソリューションもますます複雑になっていますが、一般的な理論は変わりません。手作業で繰り返される作業を高速かつ/または低エラー率で引き受け、人間の第一線作業員を解放して、彼らが楽しめる、より興味深くやりがいのある仕事に集中させることです。 この点で、オートメーション・ソリューションは、第一線の手作業プロセスをマッピングするというチューリップの目的と同様のプロセスとみなすことができる。
これをサポートするために、Techiniconと共同で、あらゆるモデルのUniversal Robotsからデータを収集するUniversal Robots Monitoring Appが作成されました。
TechniconとUniversalロボットを使い始める
Tulip APIや既存のMESからのOPC UAソリューションを使用して、このアプリにデータを取り込む方法はいくつかあります。しかし、Technicon Gatewayを使用してロボットの動作から情報を収集し、Tulipに転送することも可能です。
 {高さ="" 幅=""}。
{高さ="" 幅=""}。
Techniconゲートウェイは、デバイスを設定するだけで、ユニバーサルロボットにシームレスに接続する方法を提供します。ロボット自体をインターネットに接続したり、既存のソリューション設計を壊したり妨げたりする可能性のある新しいソフトウェアをインストールしたりする必要はありません。 データはワイヤレスまたはモバイルネットワーク経由で送信できます。 テクニコンは、ユニバーサルロボット、ファナックロボット、ベッコフPLC、シーメンスPLCなどのコアテクノロジーでこのゲートウェイを使用した多くの実績があります。
チューリップ統合セットアップ
チューリップのマシンモニタリングAPI
Tulipのマシンモニタリングは、マシンの現在の状態を表示する使いやすいインターフェースを提供します。 ユニバーサルロボットの全モデルに存在する38の標準属性(実行、停止、一時停止、温度、個々のロボットジョイントの電流など)をすべて含む、ユニバーサルロボットタイプのマシンがアプリに含まれています。
TulipのテーブルAPI
このアプリは、Universalロボットの属性、状態、ログに記録されるイベントを収集できるカスタムテーブルをいくつか使用しています。これらのテーブルは、アプリをTulipインスタンスにインポートすると自動的に作成されます。
Device Registerは、一意のMachine APIテーブルIDの割り当てを含め、ロボットを手動で定義するためのものです。 このリンクはAPIが機能するために必要です。
UR Logは、すべての標準的な38の属性を1つのテーブル行として収集することができます。
アトリビュート・ログは、ロボットのプログラム変数などの収集のために自分で定義したいカスタム・アトリビュートの収集を可能にします。
イベントログでは、定義して分析したいカスタムイベントを収集できます。 例:"PauseButtonPressed"
機能例
機能例には5つのステップがあり、それぞれがTulipとURの統合のさまざまな側面を紹介する機能を備えています。Robotメニューを使用して利用可能なマシンから監視するロボットを選択し、Goto Dataメニューを使用してジャンプするステップを選択します。
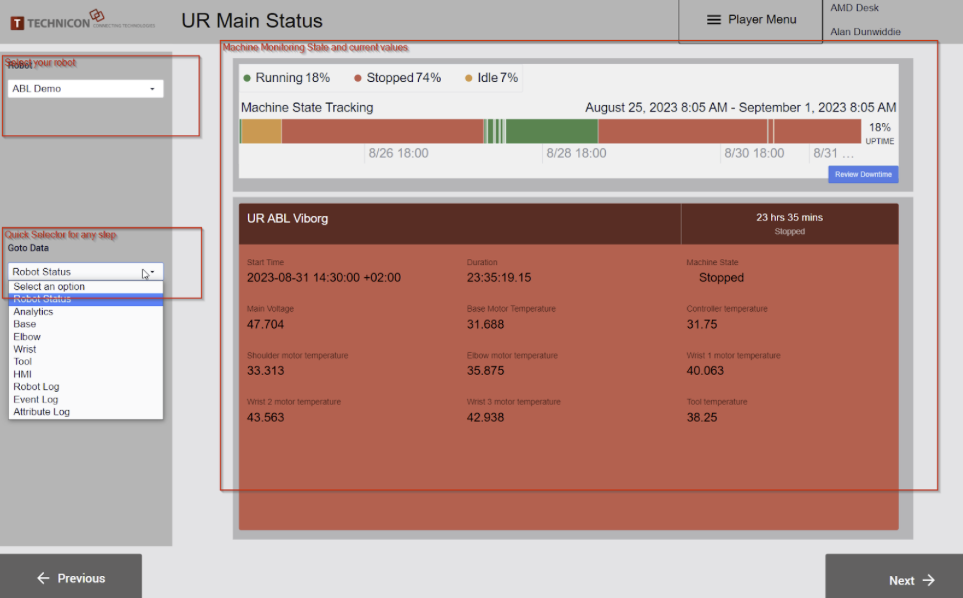
URメインステータス
このステップでは、ユーザーは選択したロボットの全体的なマシンステータスを見ることができます - 利用可能なデータを表示するためにチューリップのネイティブウィジェットを使用します。
 {高さ="" 幅="" }。
{高さ="" 幅="" }。
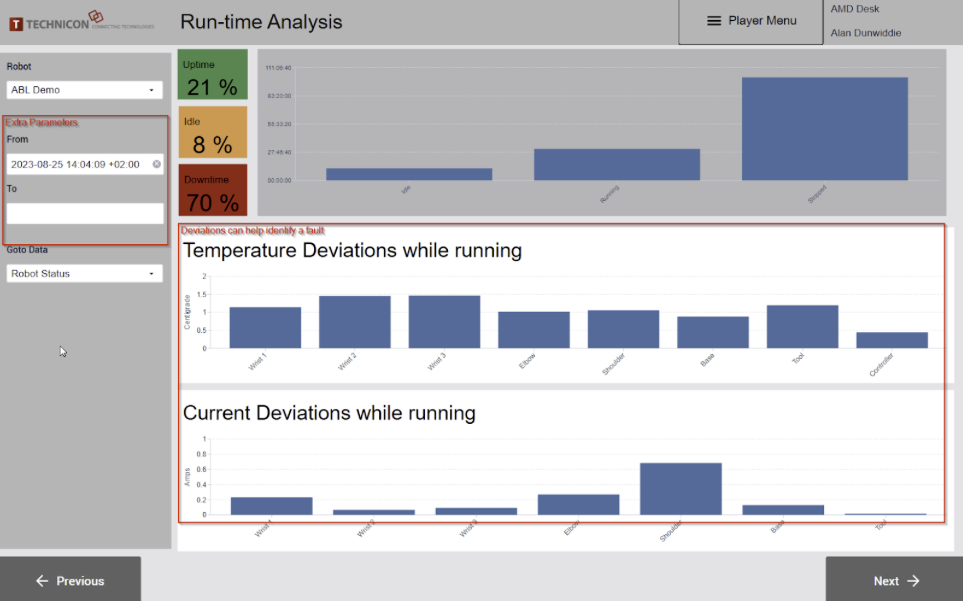
ランタイム分析
このステップでは、選択されたロボットの指定された時間枠のランタイム分析を表示します。日時ピッカーを使用して、分析の時間枠を選択します。
 {高さ="" 幅=""}。
{高さ="" 幅=""}。
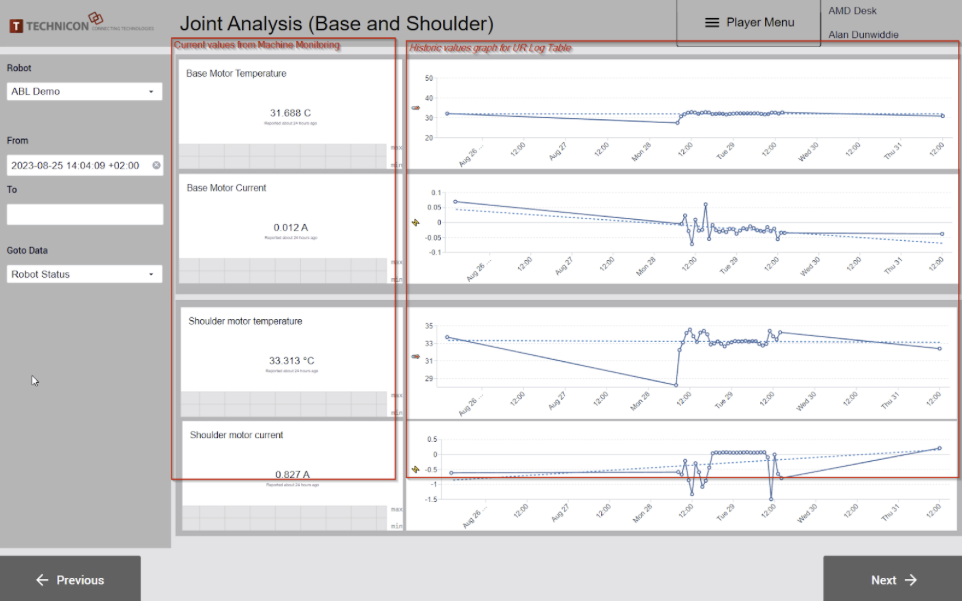
関節分析
このステップでは、選択したロボットのコアジョイント(ベースとショルダー)データをモニターすることができます。
 {現在の値と履歴をグラフで表示します。}
{現在の値と履歴をグラフで表示します。}
HMIモニターの概要
HMI Monitorステップでは、ロボットの各関節の詳細な関節データを表示します。
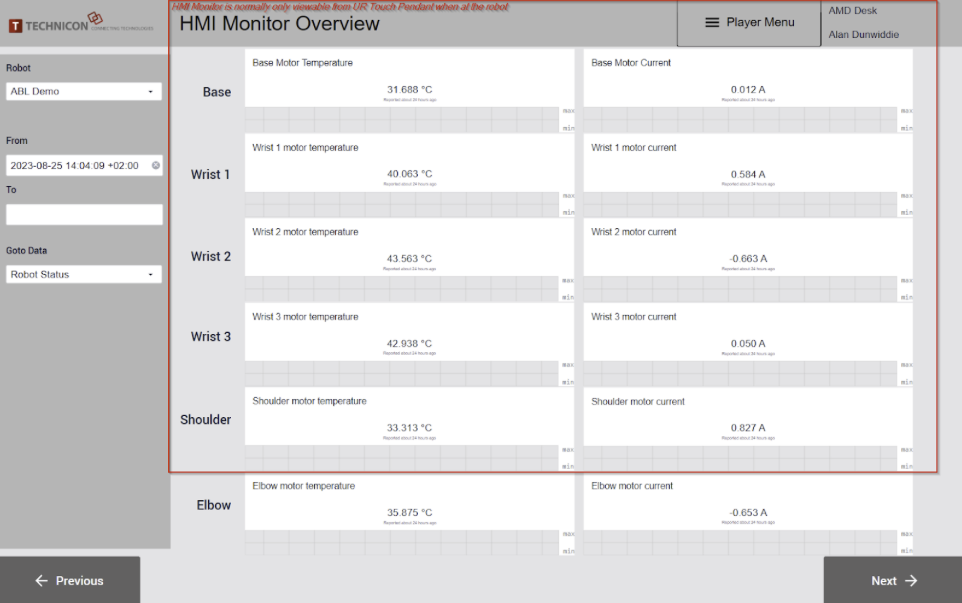 {height="" width=""} URログ
{height="" width=""} URログ
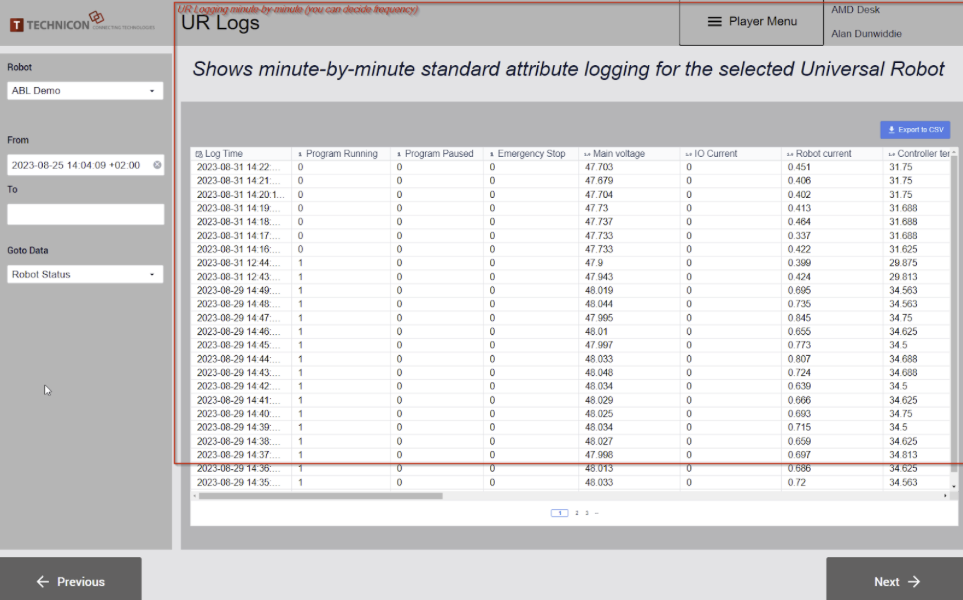
URログ
このステップでは、選択したロボットの標準属性データのログを分単位で表示します。
 {高さ="" 幅=""}。
{高さ="" 幅=""}。
この記事は、「Tulipによるユニバーサルロボット監視-技術者がTulipをユニバーサルロボットの遠隔監視に適用する理由と方法(2023年)」の記事に基づいて書かれました。