
To download the app, visit: Library
:::本文介绍如何使用 Tulip 应用程序从通用机器人 (UR) 收集数据
目的
自动化解决方案在工业中越来越普遍。 这些解决方案也变得越来越复杂,但总体理论却保持不变,即以高速和/或低错误率执行人工重复性任务,让一线工人能够专注于他们喜欢的、更有趣和更具挑战性的工作。 在这方面,自动化解决方案可以被视为与郁金香公司映射一线人工流程的目标相似的过程。
为了支持这一目标,Tulip 与 Techinicon 合作开发了 Universal Robots 监控应用程序,该应用程序可收集所有型号 Universal Robots 的数据。
开始使用 Technicon 和 Universal 机器人
有几种不同的方法可以使用 Tulip API 或现有 MES 的 OPC UA 解决方案将数据导入该应用程序。不过,也可以使用 Technicon Gateway 从机器人运行中收集信息,并将其转发给 Tulip。
 {height="" width="""}
{height="" width="""}
Technicon Gateway 提供了一种无缝连接通用机器人的方式,只需对设备进行配置即可,而无需将机器人本身连接到互联网,也无需安装可能会破坏或妨碍现有解决方案设计的新软件。 数据可以通过无线或移动网络发送。 Technicon 在将该网关与 Universal Robot、Fanuc Robot、Beckhoff PLC 和 Siemens PLC 等核心技术结合使用方面拥有丰富的经验。
图利普集成设置
Tulip 的机器监控 API
Tulip 的机器监控提供了一个易于使用的界面来显示机器的当前状态。 应用程序中包含一个通用机器人类型的机器,其中包含所有型号通用机器人的全部 38 个标准属性(如运行、停止、暂停、温度和单个机器人关节的电流)。
郁金香表 API
该应用程序使用多个自定义表格,可以收集 Universal 机器人的属性、状态和记录的事件。将应用程序导入到您的 Tulip 实例后,将自动创建这些表格。
设备注册(Device Register)用于手动定义机器人,包括分配唯一的机器 API 表 ID。 该链接是 API 运行所必需的。
UR 日志允许将所有标准 38 属性收集为单个表行,以便分析特定时刻的状态(如关节温度与电流)。
属性日志允许收集用户自定义的属性,如机器人程序变量。
事件日志可收集您希望定义和分析的自定义事件。 例如,"PauseButtonPressed(暂停按钮按下)"。
如何运行
功能示例有五个步骤,每个步骤都有一组功能,用于展示 Tulip 和 UR 之间集成的不同方面。使用 "机器人"菜单从可用机器中选择要监控的机器人,然后使用 "转到数据"菜单选择要跳转到的步骤。
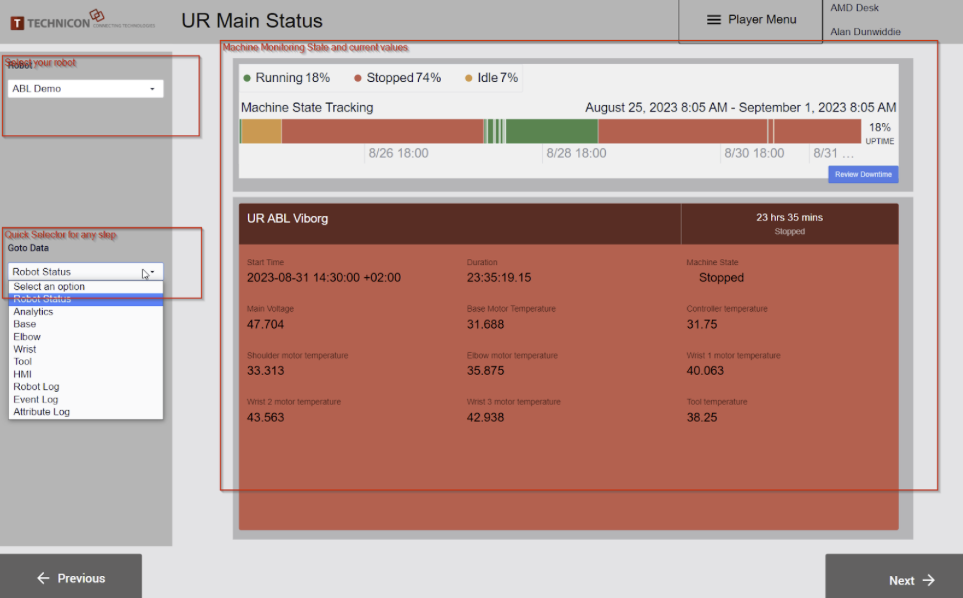
UR 主要状态
在此步骤中,用户可以看到所选机器人的总体机器状态--使用 Tulip 的本地 widget 显示可用数据。
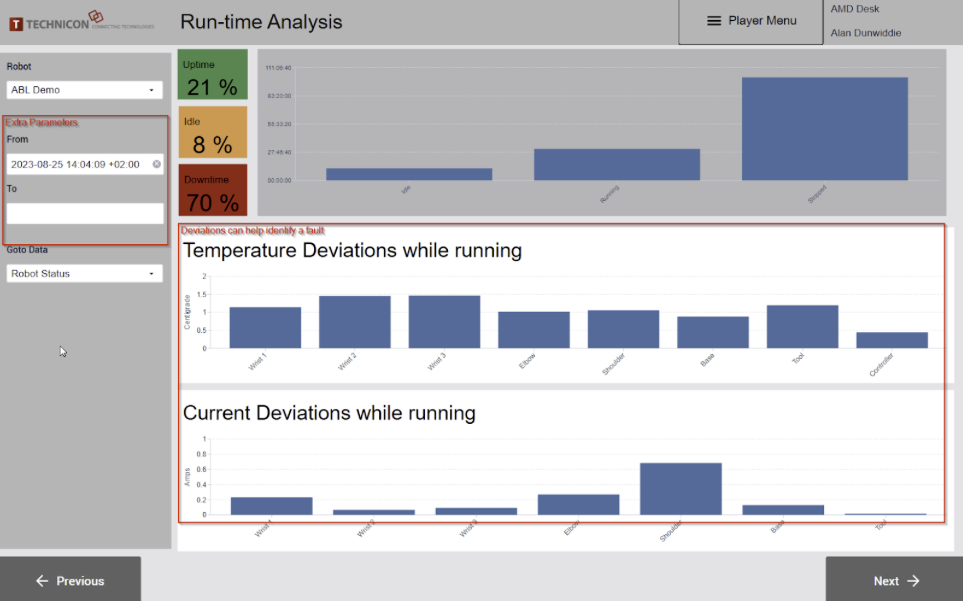
运行分析
此步骤显示所选机器人在给定时间范围内的运行时间分析。使用日期和时间选择器选择分析的时间范围。
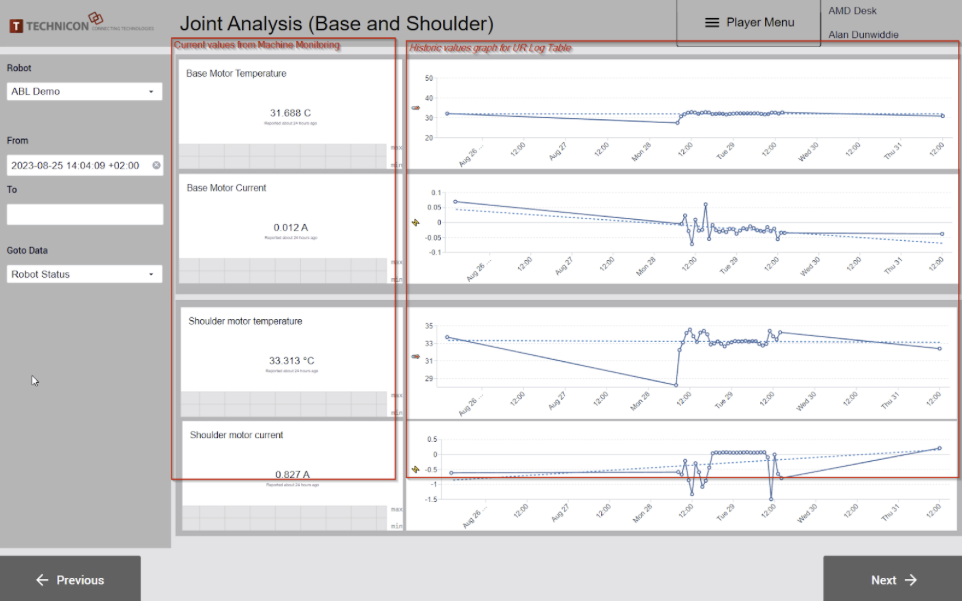
关节分析
该步骤有助于监控所选机器人的核心关节(基部和肩部)数据,在图表中显示当前值和历史读数。
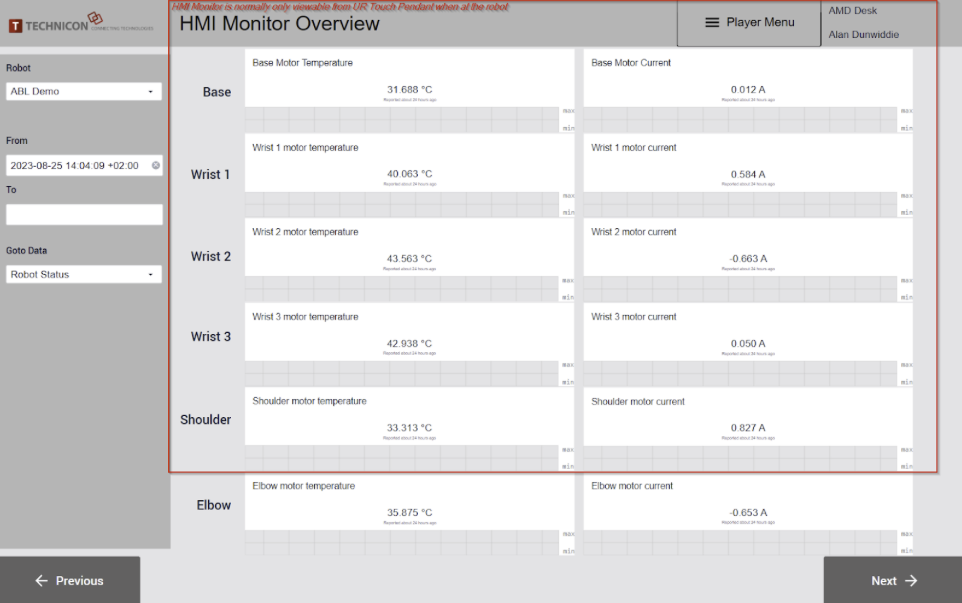
人机界面监控器概述
人机界面监控器步骤显示机器人每个关节的详细关节数据,包括电机温度和电流读数。
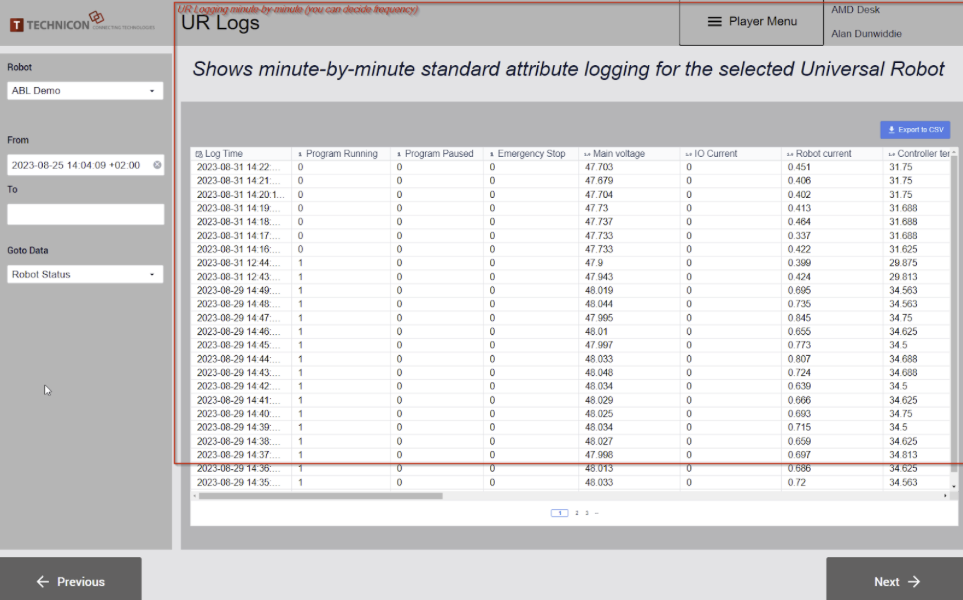
UR 日志
该步骤按分钟显示所选机器人的记录标准属性数据。
 {height="" width="""}
{height="" width="""}
本文根据 "使用 Tulip 监控通用机器人 - 技术人员为何以及如何应用 Tulip 远程监控通用机器人 (2023) "一文撰写。