
To download the app, visit: Library
:::Dieser Artikel erklärt, wie man Daten von Universal Robots (UR) mit Hilfe einer Tulip App sammelt
Zweck
Automatisierungslösungen werden in der Industrie immer häufiger eingesetzt. Die Lösungen werden auch immer komplexer, aber die allgemeine Theorie bleibt dieselbe - manuelle, sich wiederholende Aufgaben mit hoher Geschwindigkeit und/oder geringer Fehlerquote zu erledigen, so dass sich die menschlichen Mitarbeiter an der Front auf die interessanteren und anspruchsvolleren Arbeiten konzentrieren können, die ihnen Spaß machen. In dieser Hinsicht können Automatisierungslösungen als ein ähnlicher Prozess gesehen werden wie das Ziel von Tulip, die manuellen Frontline-Prozesse abzubilden.
Um dies zu unterstützen, wurde - in Zusammenarbeit mit Techinicon - die Universal Robots Monitoring App entwickelt, die Daten von Universal Robots aller Modelle sammelt.
Erste Schritte mit Technicon und Universal Robots
Es gibt verschiedene Möglichkeiten, Daten in diese App zu bekommen, indem man Tulip APIs oder sogar eine OPC UA Lösung von einem bestehenden MES benutzt. Es ist aber auch möglich, das Technicon Gateway zu verwenden, um Informationen aus dem Roboterbetrieb zu sammeln und an Tulip weiterzuleiten.
Das Technicon Gateway bietet eine nahtlose Verbindung zu einem Universalroboter, indem es einfach konfiguriert wird - ohne dass der Roboter selbst mit dem Internet verbunden werden muss oder eine neue Software installiert werden muss, die ein bestehendes Lösungsdesign unterbrechen oder behindern könnte. Die Daten können drahtlos oder über ein mobiles Netzwerk gesendet werden. Technicon hat viel Erfahrung im Einsatz dieses Gateways mit seinen Kerntechnologien Universal Robots, Fanuc Robots, Beckhoff PLCs und Siemens PLCs.
Einrichtung der Tulip-Integration
Tulip's Maschinenüberwachungs-API
Machine Monitoring in Tulip bietet eine einfach zu bedienende Schnittstelle zur Anzeige des aktuellen Zustands einer Maschine. Eine Maschine vom Typ Universalroboter ist in der App enthalten, die alle 38 Standardattribute enthält, die es bei allen Modellen von Universalrobotern gibt (wie z.B. Laufen, Stoppen, Pausieren, Temperaturen und Ströme einzelner Robotergelenke).
Tulip's Tabellen-API
Die App verwendet mehrere benutzerdefinierte Tabellen, die Universal-Roboterattribute, Zustände und protokollierte Ereignisse sammeln können. Diese Tabellen werden automatisch erstellt, wenn Sie die App in Ihre Tulip-Instanz importieren.
Device Register dient zur manuellen Definition Ihrer Roboter, einschließlich der Zuweisung der eindeutigen Machine API Table ID. Diese Verbindung ist notwendig, damit die APIs funktionieren.
UR Log ermöglicht die Erfassung aller 38 Standardattribute in einer einzigen Tabellenzeile, so dass der Zustand zu einem bestimmten Zeitpunkt analysiert werden kann (z.B. Temperatur eines Gelenks im Vergleich zum Strom).
Attribut Log ermöglicht die Erfassung von benutzerdefinierten Attributen, die Sie selbst für die Erfassung z. B. von Roboterprogrammvariablen definieren möchten.
Ereignisprotokoll ermöglicht das Sammeln von benutzerdefinierten Ereignissen, die Sie definieren und analysieren möchten. Z. B. "PauseButtonPressed"
Wie funktioniert es?
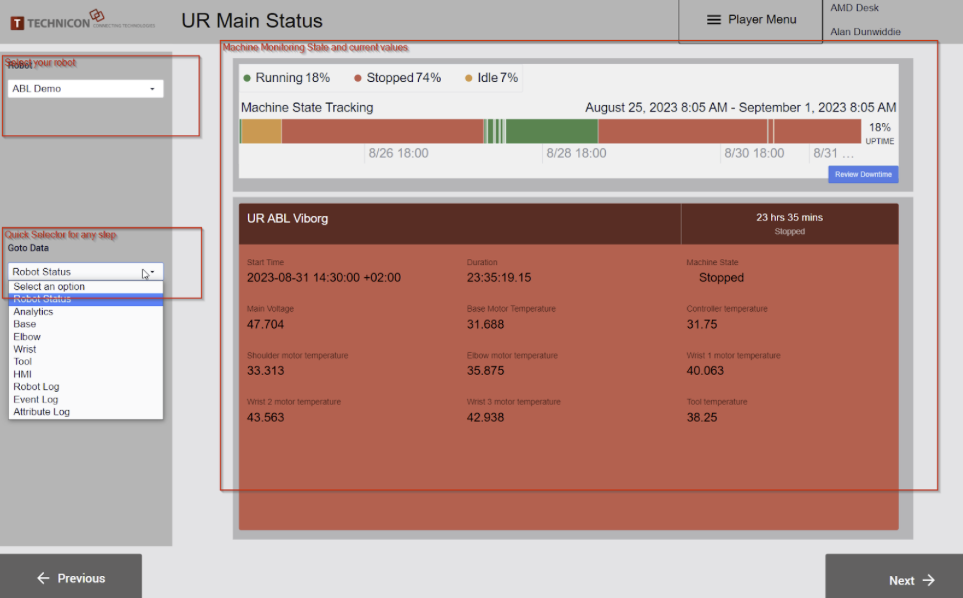
Das Funktionsbeispiel besteht aus fünf Schritten - jeder mit einer Reihe von Funktionalitäten, um verschiedene Aspekte der Integration zwischen Tulip und UR zu zeigen. Wählen Sie den zu überwachenden Roboter aus den verfügbaren Maschinen im Menü Roboter aus und verwenden Sie das Menü Gehe zu Daten, um den Schritt auszuwählen, zu dem Sie springen möchten.
UR-Hauptstatus
In diesem Schritt kann der Benutzer den allgemeinen Maschinenstatus des ausgewählten Roboters sehen - unter Verwendung des Tulip-eigenen Widgets zur Anzeige der verfügbaren Daten.
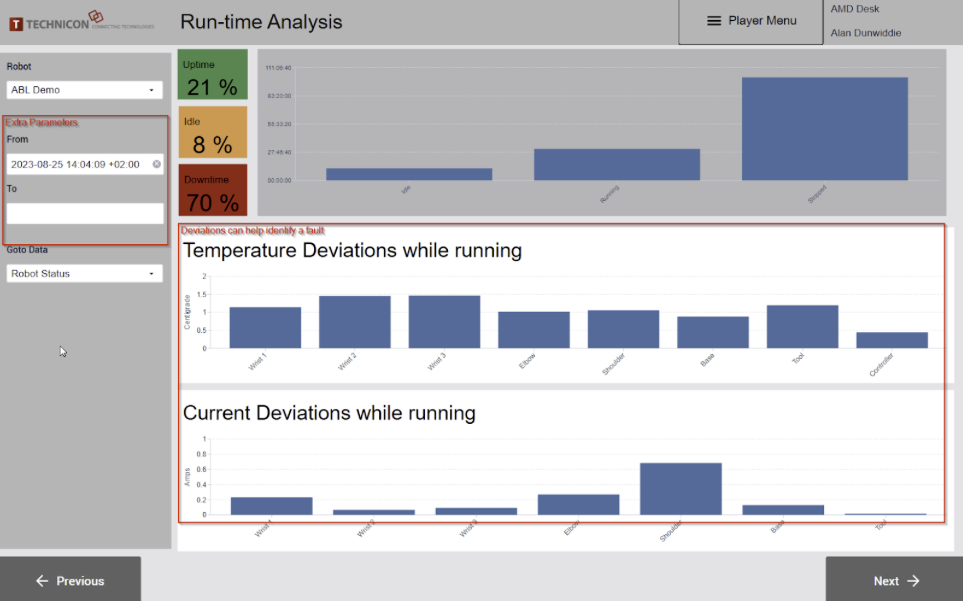
Laufzeitanalyse
Dieser Schritt zeigt eine Laufzeitanalyse des ausgewählten Roboters für den angegebenen Zeitraum an. Verwenden Sie die Datums- und Zeitauswahl, um den Zeitrahmen für die Analyse auszuwählen.
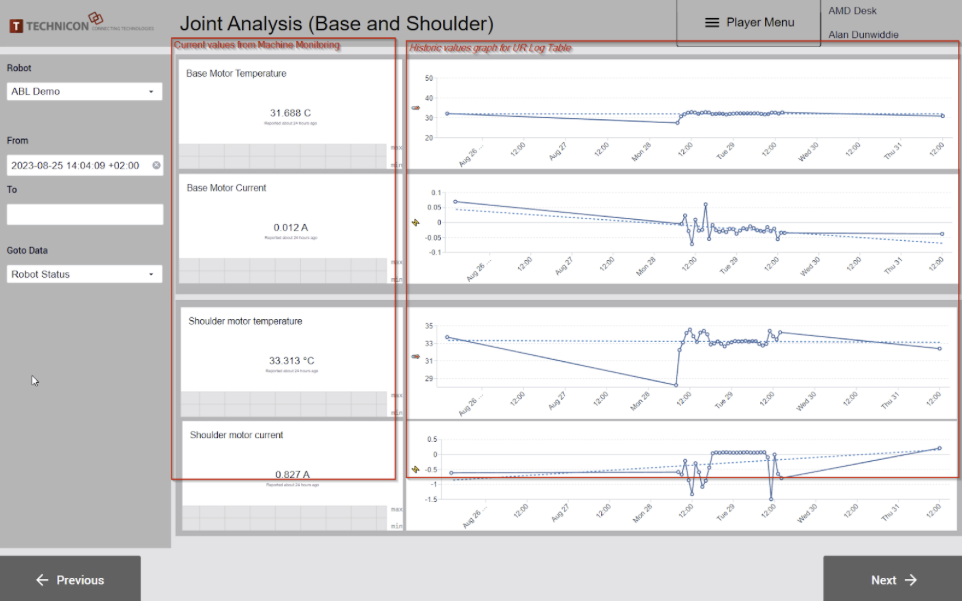
Gelenkanalyse
Dieser Schritt hilft bei der Überwachung der Kerngelenksdaten (Basis und Schulter) des ausgewählten Roboters, wobei sowohl die aktuellen Werte als auch die historischen Werte in einem Diagramm angezeigt werden.
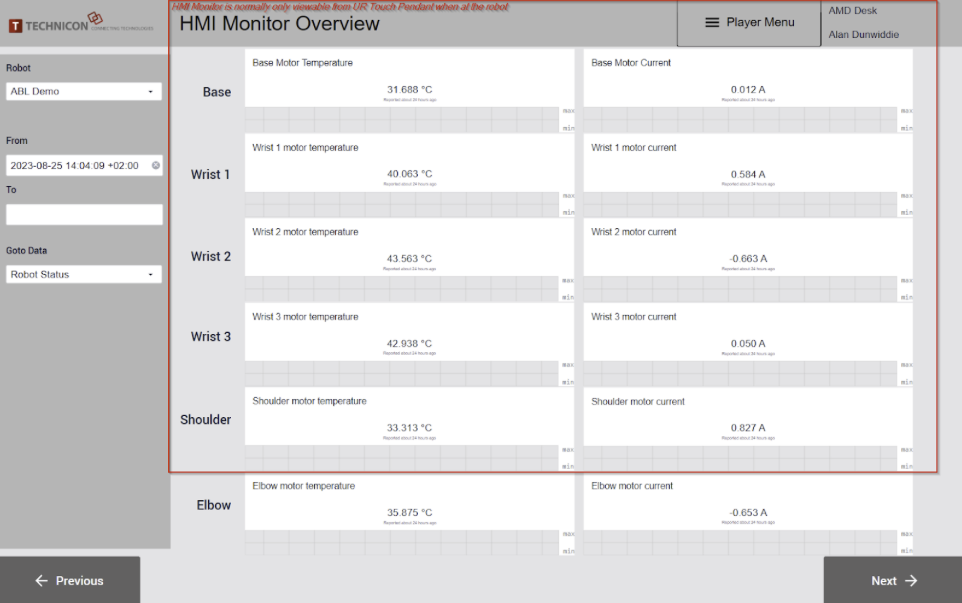
HMI-Monitor Übersicht
Der Schritt HMI-Monitor zeigt detaillierte Gelenkdaten für jedes Gelenk des Roboters an - einschließlich der Motortemperatur und der aktuellen Messwerte.
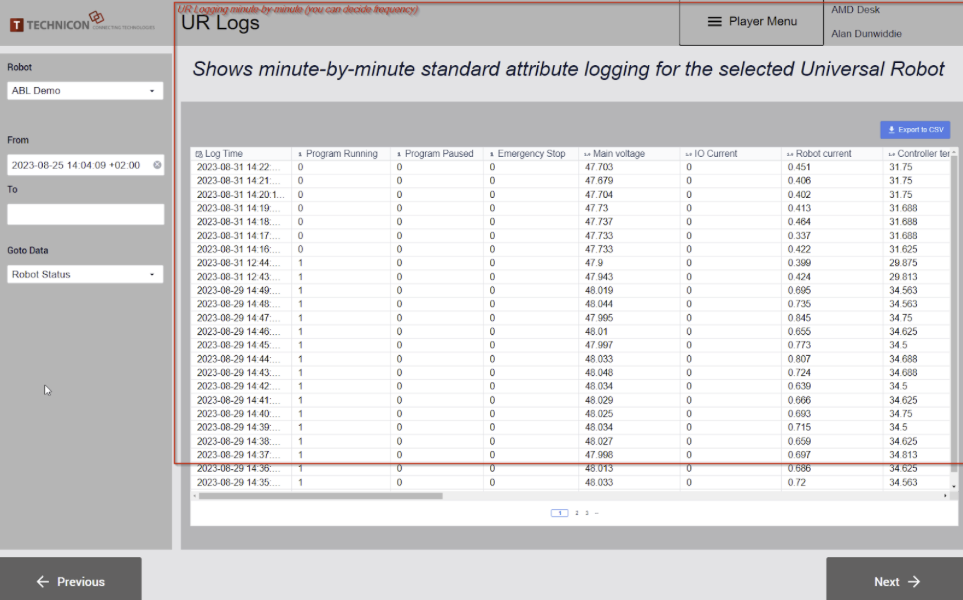
UR-Protokolle
Dieser Schritt zeigt protokollierte Standardattributdaten für den ausgewählten Roboter auf Minutenbasis an.
Dieser Artikel wurde auf der Grundlage des Artikels 'Universal Robot Monitoring with Tulip - Why and How Technicians Apply Tulip to Remotely Monitor Universal Robots (2023)' geschrieben.