
トルクオーパードライバーガイド:::(Info) (Torque-OP on Player)
With Player 2.8.0 and release r319, you can now run Torque-OP directly from Player (Windows only)!
:::
概要
Tulip Edge Devices and PlayerのTorque Open Protocolドライバ(またはTorque-OP)は、アトラスコプコのオープンプロトコル仕様をサポートするデバイスと通信できます。
アトラスコプコはこの標準を作成した会社ですが、多くのメーカーがこの標準プロトコルをサポートしています。このドライバは、以下のトルクコントローラでテストされています:
- アトラスコプコ
- クレコ
- Ingersoll Rand
- スタンレー・ブラック&デッカー
- デサウター
- Kolver K-Ducer
お使いのトルクコントローラがこのプロトコルに対応しているかどうかは、製品のマニュアルを参照するか、販売または流通担当者にお問い合わせください。この記事の下部には、ブランド固有のリソースがあります。
この記事で使用する簡単な定義をいくつか示しますが、ブランドによって異なる場合があります:*パラメータ・セット- トルクと角度の要求を組み合わせる必要がある、トルク・コントローラへの命令のセット。
トルクOPドライバは以下の機能をサポートしています:
- **設定(Playerのみ)**Playerからトルクコントローラに接続するためのコマンドです。
- 注意:IPアドレスの末尾に":4545 "を追加する必要があります。
- Enable Tool」コマンドをコントローラに送信します。
- コントローラに「Disable Tool」コマンドを送信する。
- コントローラに「Set Parameter Set ID」コマンドを送信する。
- コントローラに「Set Job ID」コマンドを送信する。
- コントローラが有効または無効であることを示す「Tool Status」メッセージをコントローラから受信する。
- トルク、 角度、 すべての測定が範囲内であったかど う か と い っ た最後の締付け イ ベン ト に関す る 情報を含む 「Tightening Event」 メ ッ セージを コ ン ト ロ ー ラ か ら受信。
- 最後の締め付けからの1つのトレースタイプのトレースカーブデータを含む、コントローラからの「Trace Data」メッセージを受信する。1つのトレースタイプにつき1つのメッセージが出力されます。ドライバ構成で、どのトレースタイプをキャプチャするかを選択します(デバイスと互換性のあるトレースタイプのみを選択します)。注:このデータタイプは、Kolver 互換モードでのみ検証されています。
注:Torque Open Protocol Driverは、I/O Gateway v1.1.0以降の限られた機能でのみ使用可能です。設定メニューでのポートの選択、パラメータ・セットの要求、拡張締め付けデータの受信は、I/O Gateway v1.3.2以降で使用できます。
エッジデバイスのOSバージョンを確認するには、このガイドを使用してください。
ドライバの使用
このドライバを使用するには、Tulip Edge Deviceが必要です。ドライバを使用するには、まずエッジデバイスでTorque-OPドライバを設定し、この接続を使用するチューリップアプリを作成する必要があります。
Tulip Playerを使用する場合は、アプリに情報を入力する必要があります。
プレーヤーのドライバーを有効にする
まず、トルクコントローラーがプレーヤーと同じネットワークに接続されていることを確認してください。
以下は、トルクツールの設定方法です(アドレスはツールのIPアドレスで、末尾に「:4545」が必要な場合があります)。
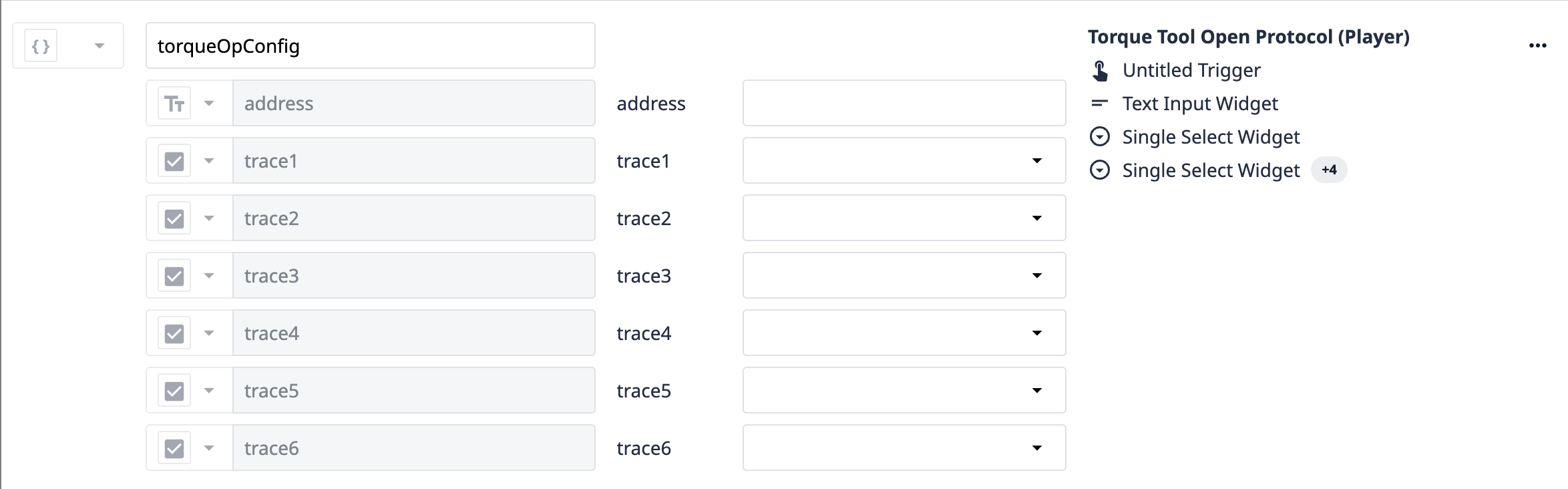 {高さ="" 幅=""}。
{高さ="" 幅=""}。
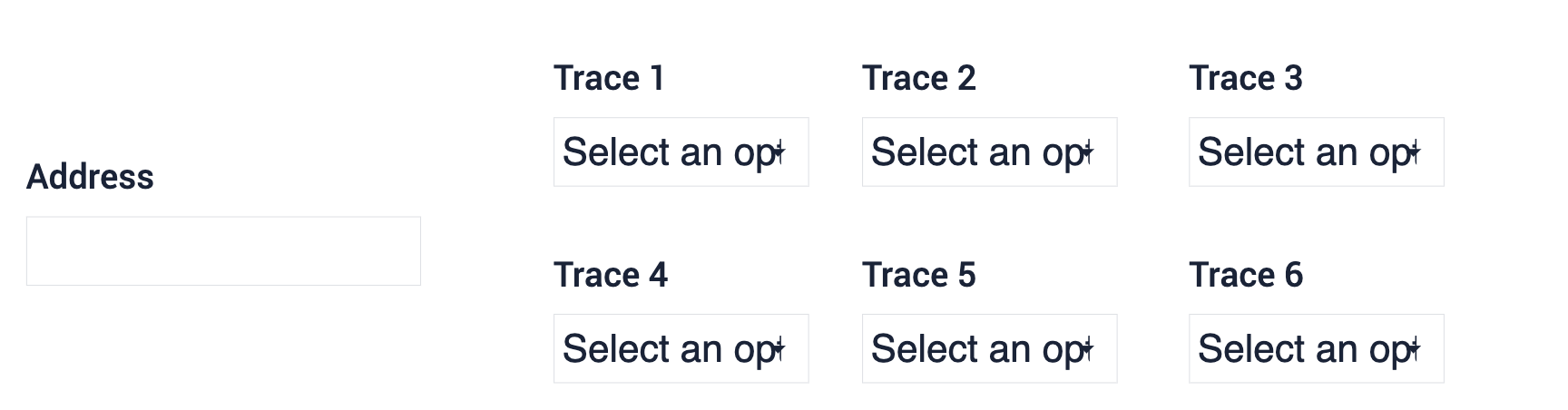 height="" width=""}{height="" width=""}
height="" width=""}{height="" width=""}
次に、トリガエディタで、"Torque Open Protocol "を選択したら、コンフィギュレーションとコントローラ名を設定します。
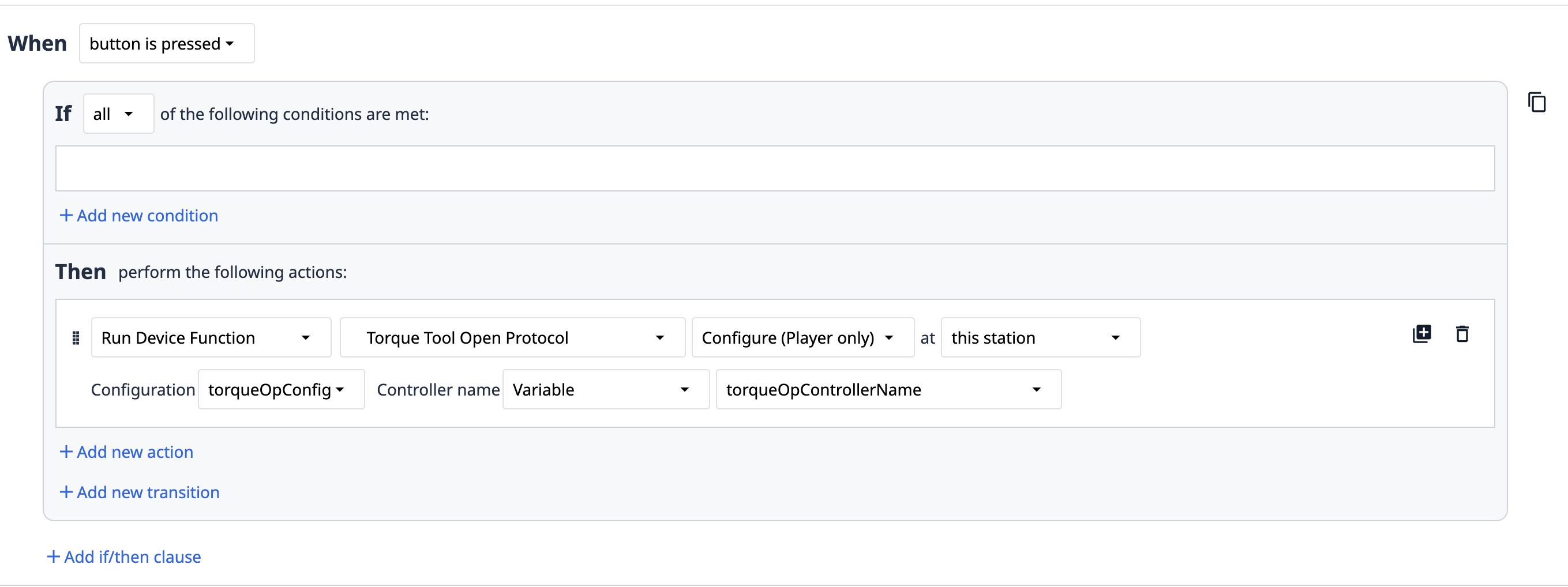 {height="" width=""} エッジのドライバを有効にします。
{height="" width=""} エッジのドライバを有効にします。
エッジデバイスのドライバを有効にする
まず、TorqueコントローラーがEdge Deviceと同じネットワークに接続されていることを確認してください。エッジデバイスがネットワーク経由でトルクコントローラに接続を作成します。
次に、デバイスポータルのドライバ設定ページにアクセスし、「Torque-OP」ドライバメニューを選択します。
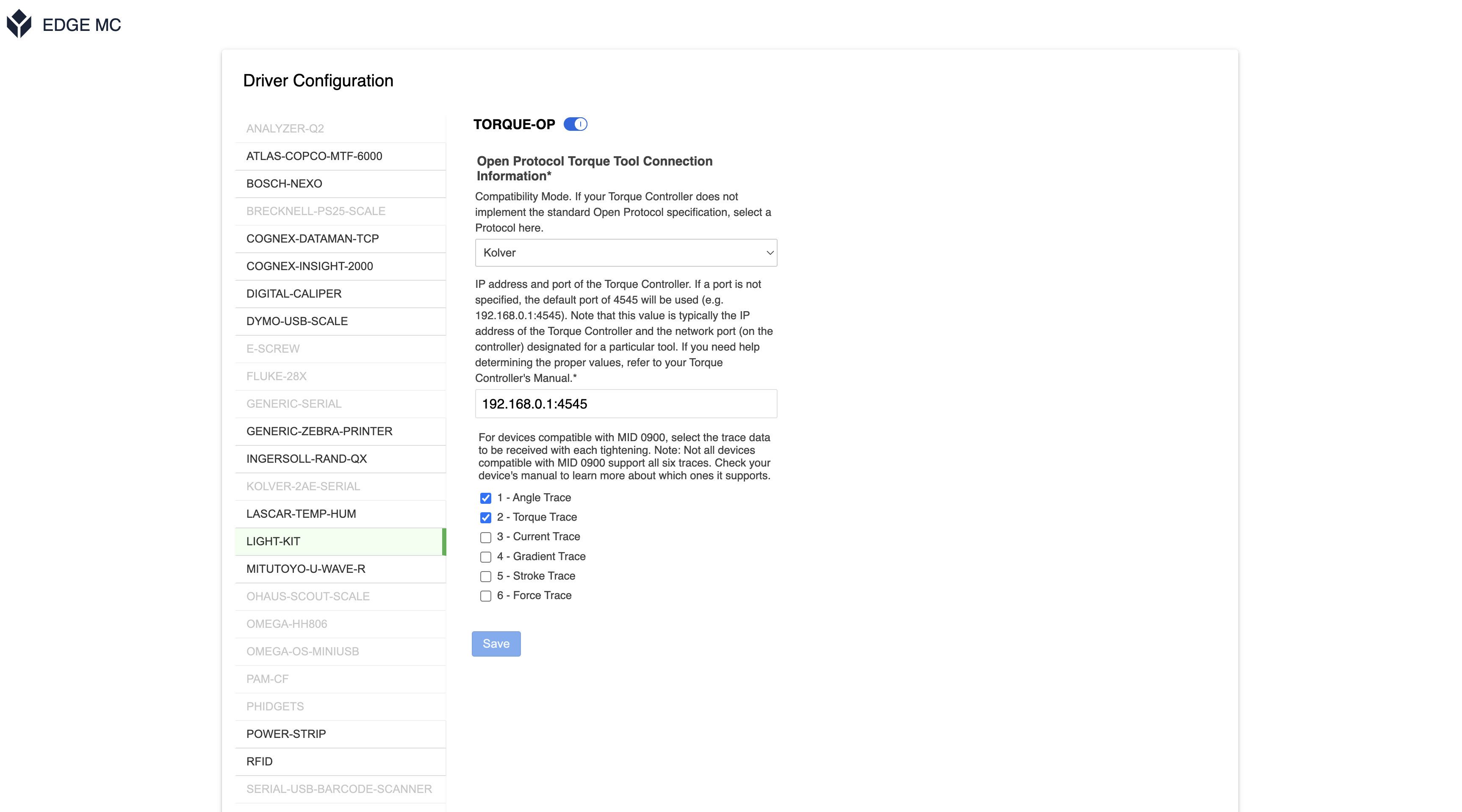 {height="" width=""} ここでIPアドレスを指定します。
{height="" width=""} ここでIPアドレスを指定します。
ここで、トルクコントローラのオープンプロトコルサーバーのIPアドレスとポートを指定する必要があります。
トルクコントローラのTorque Open Protocolサーバーを有効にする方法について質問がある場合は、製品のマニュアルを参照するか、営業担当者または販売代理店にお問い合わせください。
チューリップアプリの作成
次のステップは、このドライバを使用するTulipアプリを作成することです。
アプリを作成し、トリガーを使用してドライバーと対話します。
このドライバがサポートするトリガイベントには2種類あります。
最初のタイプは、トルクコントローラーに情報を送信するコマンドです。これらのコマンドはトリガーアクションで送信されます。サポートされているイベントタイプは以下の画像で確認できます。
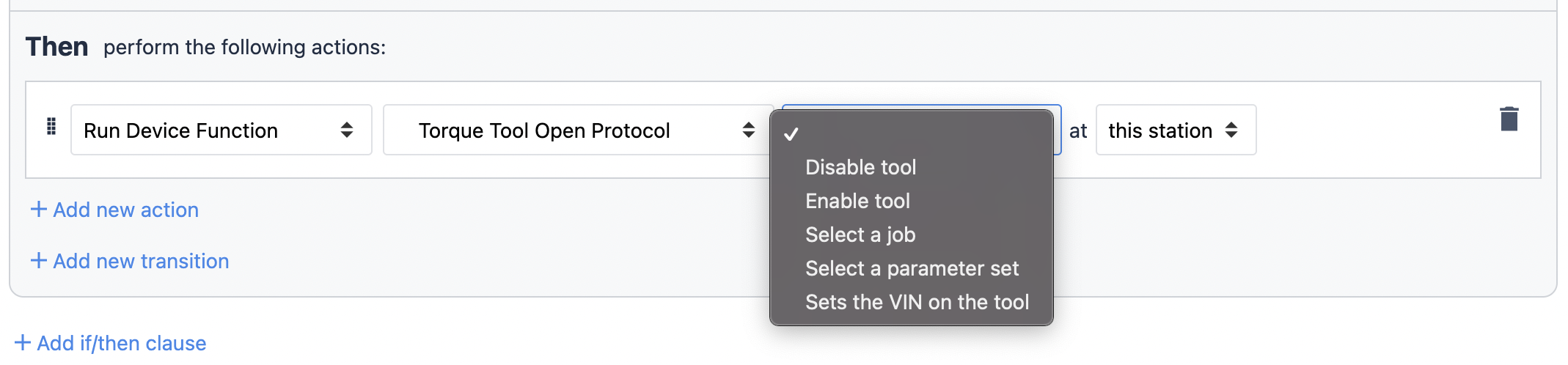
次に
- "Run Device Function" "Torque Tool Open Protocol" (アクションを選択)
各コマンドは、そのコマンドに関連する必要な情報の入力を促します。
トリガーイベントの2番目のタイプは、トルクコントローラからデータを受信することです。これらのトリガは、"When "節の "Step Triggers "としてのみ使用可能です。以下のオプションに注意してください:
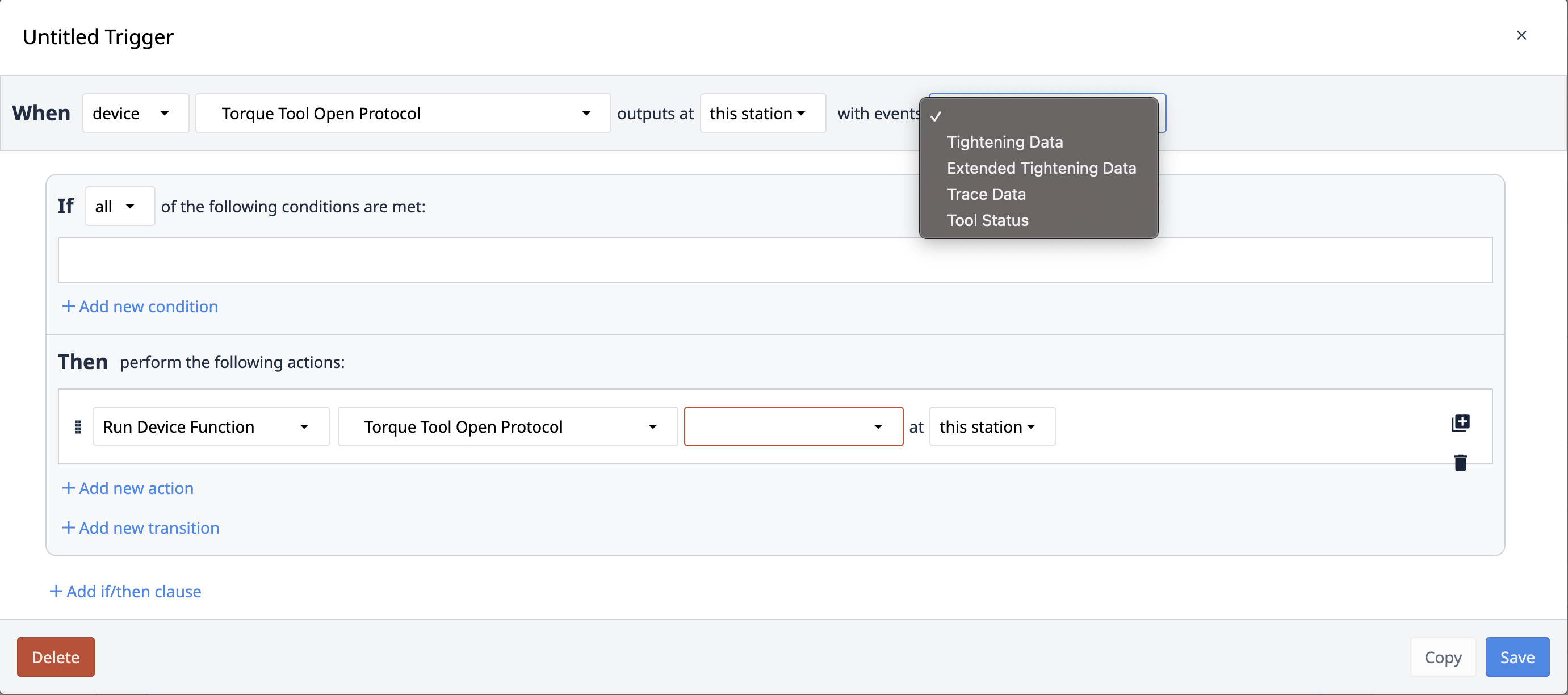 {height="" width=""} 以下のオプションに注意してください。
{height="" width=""} 以下のオプションに注意してください。
WHEN
- "device" "Torque Tool Open Protocol" outputs as "this station" "with events"...
ここで、"締め付けデータ "イベントには、トルク値とトルク測定が許容範囲内であったかどうかが含まれます。
Extended Tightening Data "イベントにはさらに多くの情報が含まれますが、すべてのユースケースに適用できるわけではありません。
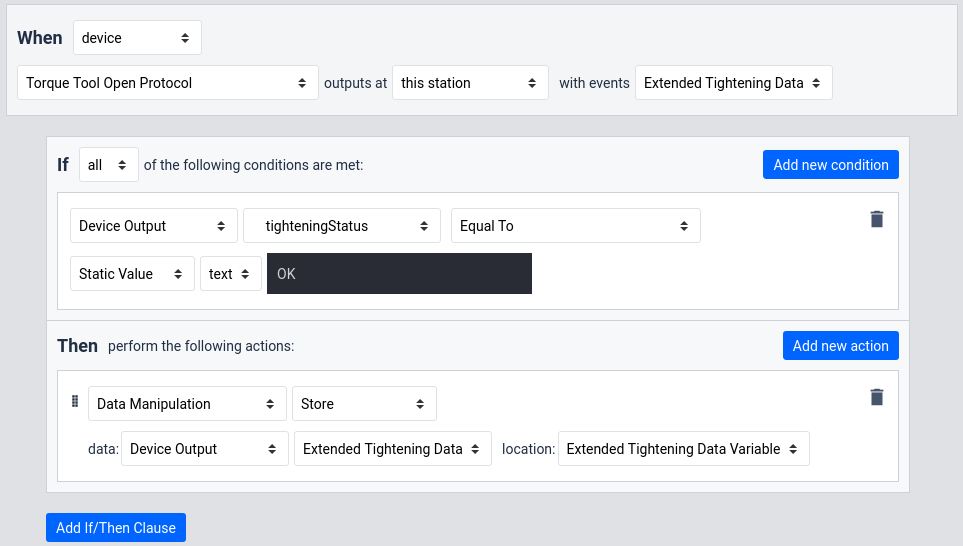
どちらのイベントでも、デバイス出力はトリガー内で利用でき、様々な状況で使用できます。下の画像では、デバイス出力の1つのプロパティを即座に使用するトリガーがあり、また、後で取得するためにデバイス出力を保存しています。
ビデオウォークスルー
Cleco mPro400GCの注意事項
Cleco mPro400GC を Tulip で使用するには、まずオープンプロトコルを有効にする必要があります:
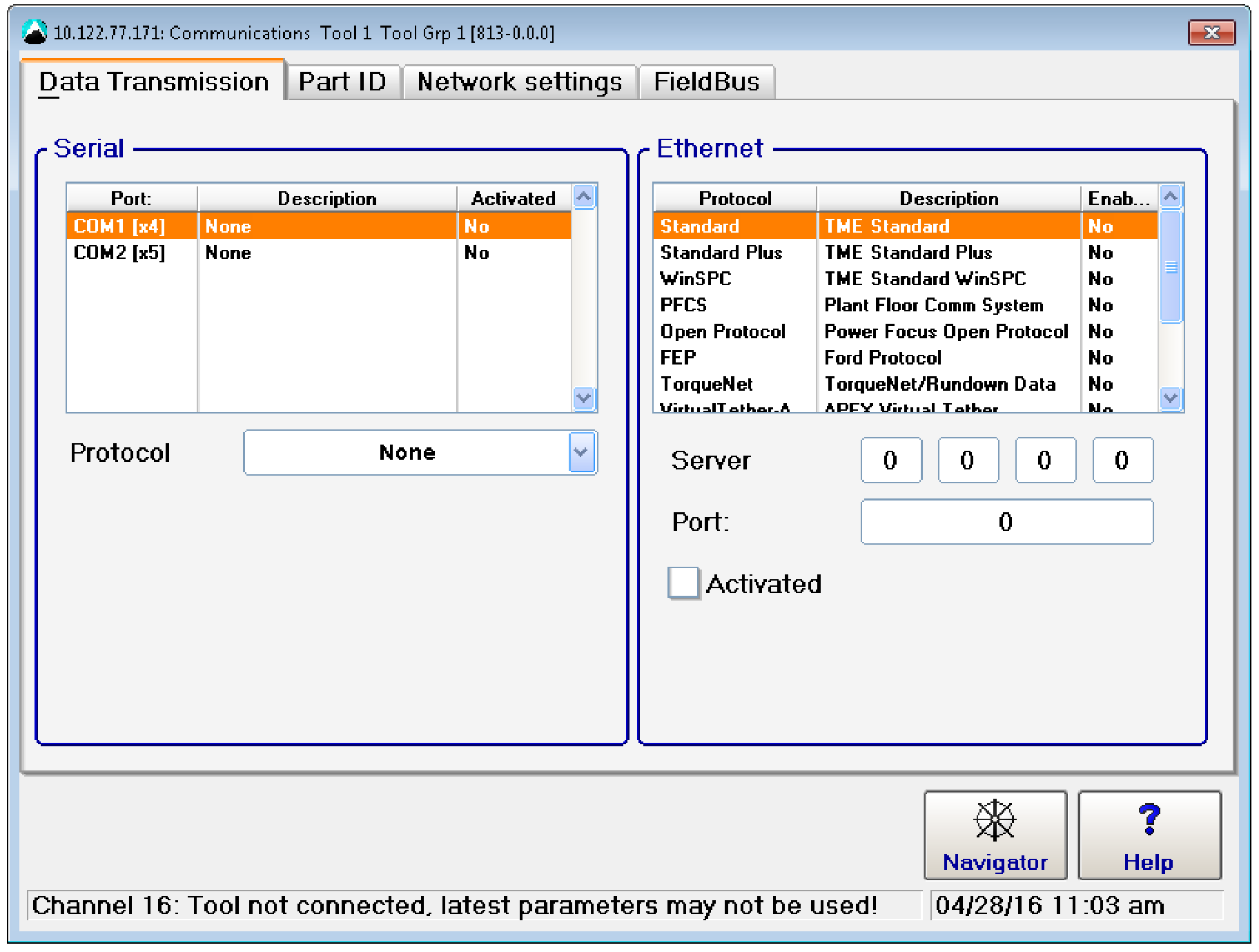
プロトコルを有効にした後、"Advanced "タブを選択し、各ツールに使用されているポートを表示します。
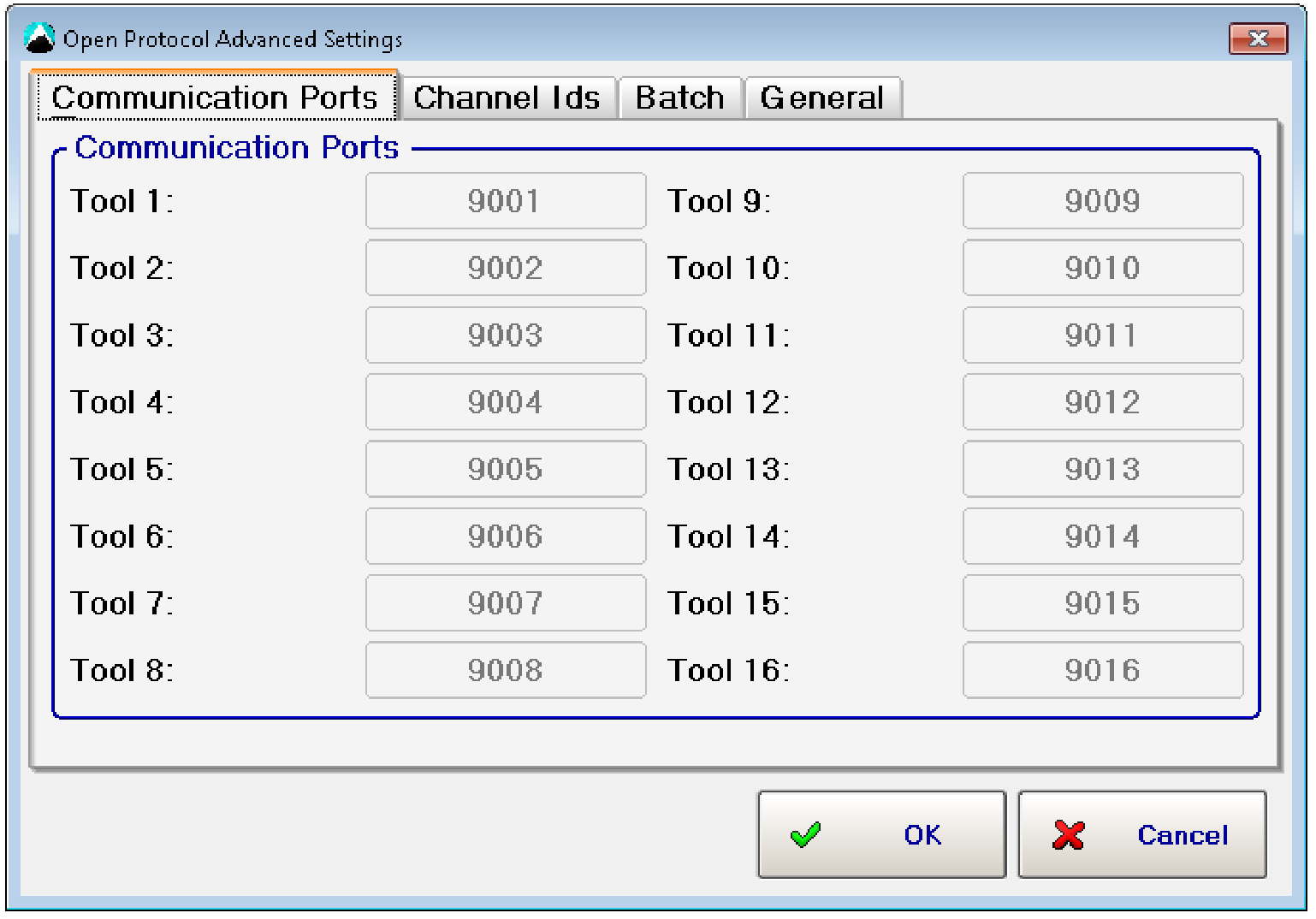
各ツールはそれぞれ独自のTCPポートを持ちます。最初のポートは設定可能で、他のポートは自動的に割り当てられます。
Desoutter Industrial Smart Hub Connectの注意事項
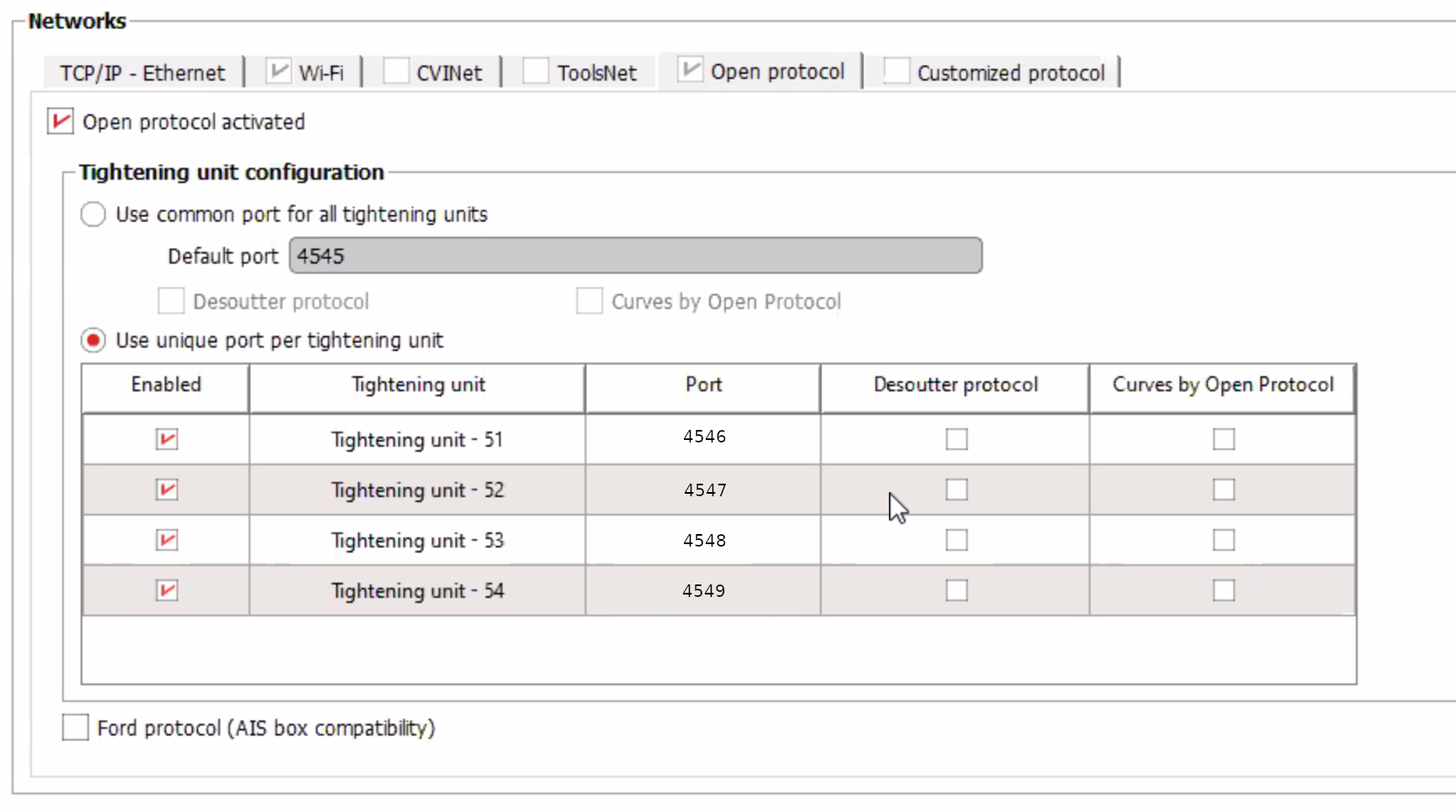
TulipでDesoutterツールを使用するには、以下のようにコントローラの "Network "タブでOpen Protocolを有効にする必要があります。
また、各トルクツールの"Running mode "の "Default Pset selection source "にOpen Protocolを設定する必要があります。
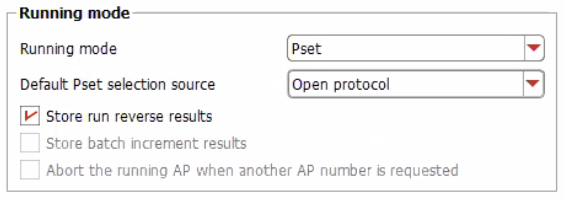
ツールを逆回転させるとデータは出力されません。