
To download the app, visit: Library
:::W tym artykule wyjaśniono, jak zbierać dane z robotów Universal Robots (UR) za pomocą aplikacji Tulip.
Cel
Rozwiązania automatyzacji stają się coraz bardziej powszechne w przemyśle. Rozwiązania te stają się również coraz bardziej złożone, ale ogólna teoria pozostaje taka sama - wykonywanie ręcznych, powtarzalnych zadań z dużą szybkością i / lub niskim poziomem błędów, zwalniając pracowników pierwszej linii, aby mogli skupić się na bardziej interesującej i wymagającej pracy, którą lubią. Pod tym względem rozwiązania z zakresu automatyzacji mogą być postrzegane jako proces podobny do celu Tulip, jakim jest mapowanie ręcznych procesów pierwszej linii.
Aby to wesprzeć - we współpracy z Technicon - stworzono aplikację Universal Robots Monitoring App, która gromadzi dane z robotów Universal Robots wszystkich modeli.
Pierwsze kroki z aplikacją Technicon i robotami Universal Robots
Istnieje kilka różnych sposobów pobierania danych do tej aplikacji za pomocą interfejsów API Tulip lub nawet rozwiązania OPC UA z istniejącego systemu MES. Możliwe jest jednak również użycie Technicon Gateway do zbierania informacji z działania robota i przesyłania ich do Tulip.
Technicon Gateway oferuje bezproblemowy sposób łączenia się z robotem Universal Robot poprzez samą konfigurację urządzenia - bez konieczności podłączania samego robota do Internetu lub instalowania nowego oprogramowania, które mogłoby zepsuć lub utrudnić istniejący projekt rozwiązania. Dane mogą być przesyłane bezprzewodowo lub za pośrednictwem sieci komórkowej. Technicon ma duże doświadczenie w korzystaniu z tej bramki z ich podstawowymi technologiami Universal Robots, Fanuc Robots, Beckhoff PLC i Siemens PLC.
Konfiguracja integracji Tulip
Interfejs API monitorowania maszyn Tulip
Monitorowanie maszyn w Tulip oferuje łatwy w użyciu interfejs do wyświetlania bieżącego stanu maszyny. W aplikacji znajduje się maszyna typu Universal Robot, która zawiera wszystkie 38 standardowych atrybutów występujących we wszystkich modelach robotów Universal (takich jak uruchomiony, zatrzymany, wstrzymany, temperatury i prądy poszczególnych przegubów robota).
API tabel Tulipa
Aplikacja wykorzystuje kilka niestandardowych tabel, które mogą gromadzić atrybuty robota Universal, stany i rejestrowane zdarzenia. Tabele te zostaną automatycznie utworzone po zaimportowaniu aplikacji do instancji Tulip.
Device Register służy do ręcznego definiowania robotów, w tym przypisywania unikalnego identyfikatora Machine API Table ID. To łącze jest niezbędne do działania interfejsów API.
UR Log umożliwia gromadzenie wszystkich standardowych atrybutów jako pojedynczego wiersza tabeli, dzięki czemu można analizować stan w danym momencie (np. temperatura złącza w stosunku do prądu).
Attribute Log pozwala na gromadzenie niestandardowych atrybutów, które można zdefiniować samodzielnie w celu gromadzenia np. zmiennych programu robota.
Event Log umożliwia gromadzenie niestandardowych zdarzeń, które można zdefiniować i analizować. Np. "PauseButtonPressed".
Jak to działa
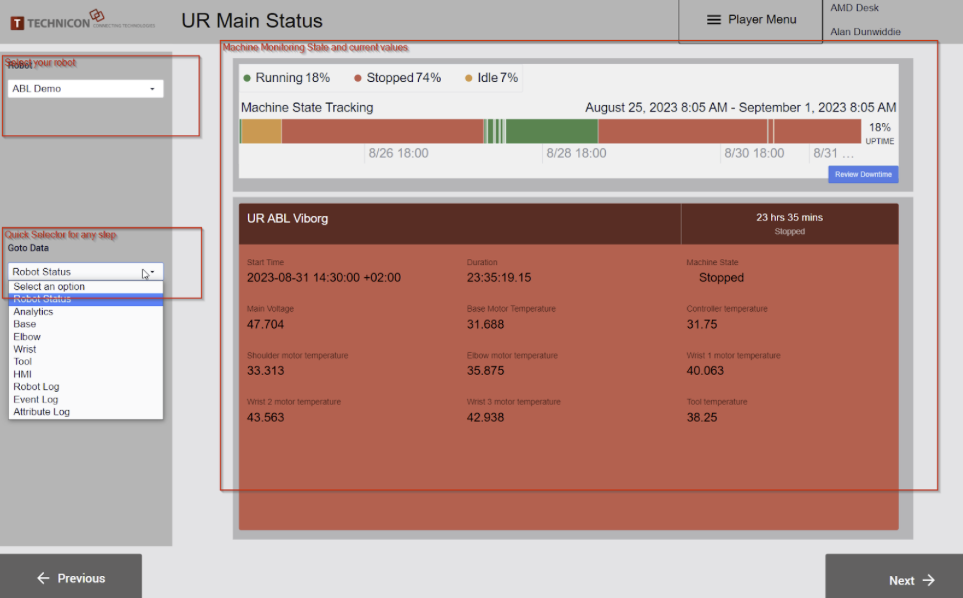
Przykład funkcjonalny składa się z pięciu kroków - każdy z nich zawiera zestaw funkcji prezentujących różne aspekty integracji między Tulip i UR. Wybierz robota do monitorowania z dostępnych maszyn za pomocą menu Robot i użyj menu Goto Data, aby wybrać krok, do którego chcesz przejść.
Główny status UR
W tym kroku użytkownik może zobaczyć ogólny status maszyny wybranego robota - używając natywnego widżetu Tulip do wyświetlania dostępnych danych.
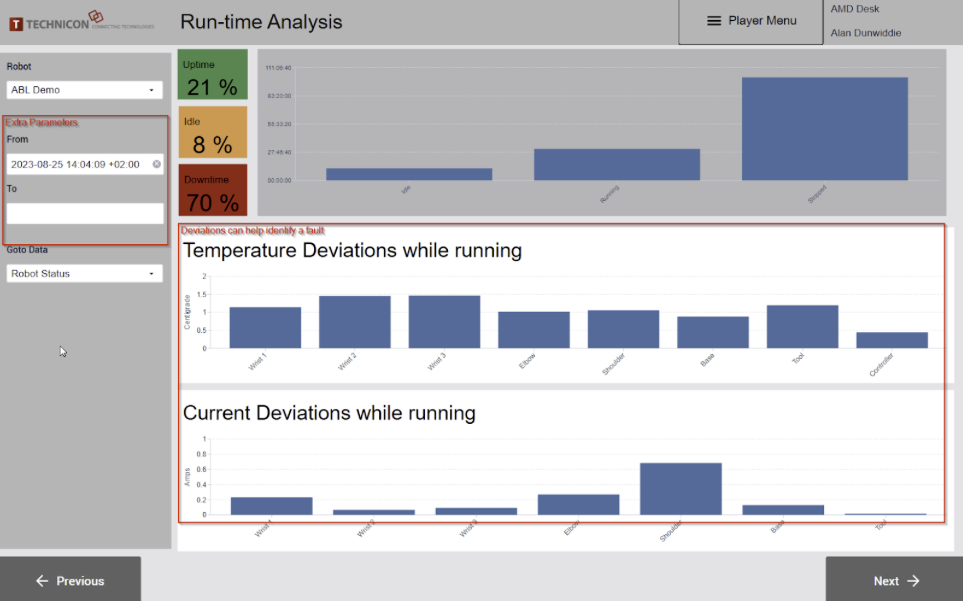
Analiza w czasie działania
Ten krok pokazuje analizę czasu pracy wybranego robota dla danego przedziału czasowego. Użyj selektora daty i godziny, aby wybrać ramy czasowe dla analizy.
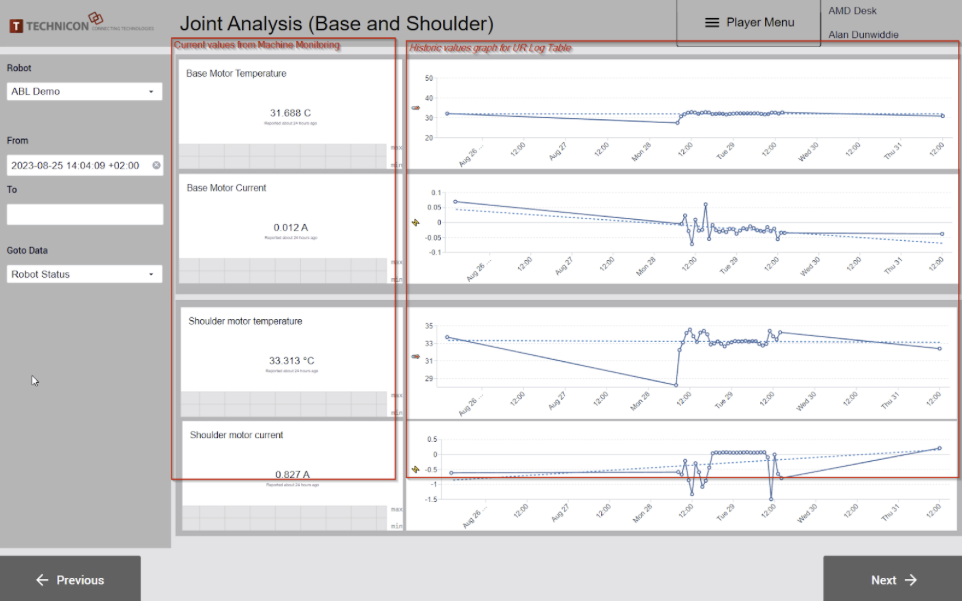
Analiza połączeń
Ten krok pomaga monitorować dane podstawowych stawów (podstawy i barku) wybranego robota - wyświetlając zarówno bieżące wartości, jak i historyczne odczyty na wykresie.
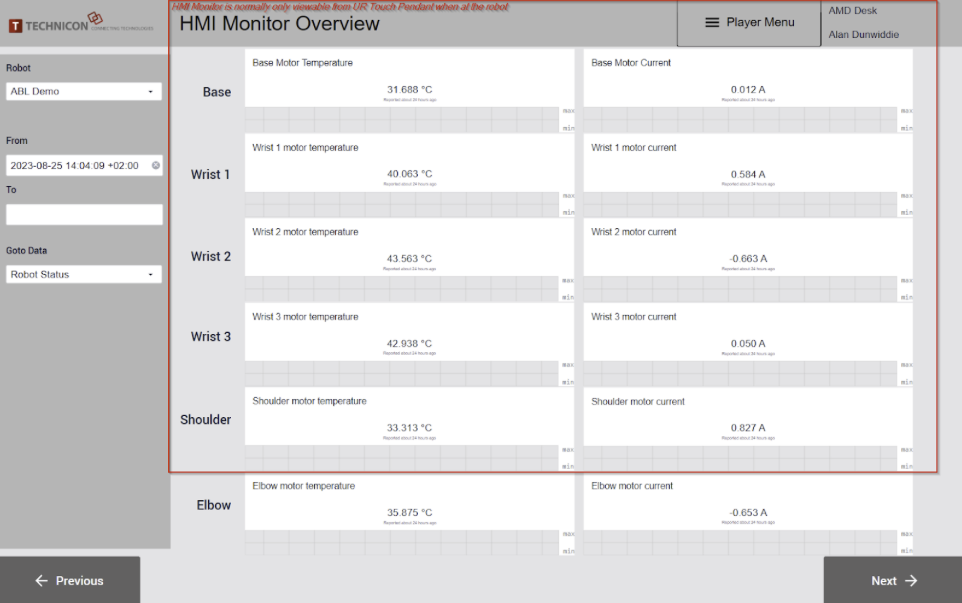
Przegląd monitora HMI
Krok HMI Monitor pokazuje szczegółowe dane przegubu dla każdego przegubu robota - w tym temperaturę silnika i bieżące odczyty.
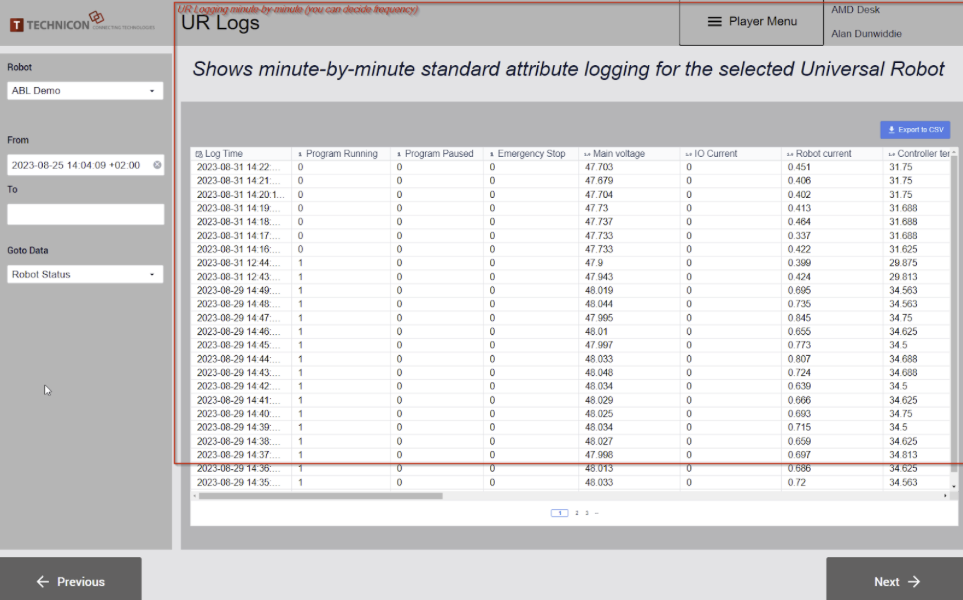
UR Logs
W tym kroku wyświetlane są zarejestrowane standardowe dane atrybutów dla wybranego robota minuta po minucie.
Artykuł został napisany na podstawie artykułu "Universal Robot Monitoring with Tulip - Why and How Technicians Apply Tulip to Remotely Monitor Universal Robots (2023)".