
To download the app, visit: Library
:::Ez a cikk elmagyarázza, hogyan gyűjthetünk adatokat az univerzális robotoktól (UR) egy Tulip alkalmazás segítségével.
Cél
Az automatizálási megoldások egyre elterjedtebbek az iparban. A megoldások is egyre összetettebbek, de az általános elmélet ugyanaz marad - a manuális, ismétlődő feladatok nagy sebességgel és/vagy alacsony hibaszázalékkal történő elvégzése, felszabadítva az emberi frontvonalban dolgozókat, hogy az érdekesebb és kihívást jelentő munkára koncentrálhassanak, amit élveznek. Ebből a szempontból az automatizálási megoldások hasonló folyamatnak tekinthetők, mint a Tulip célja a frontvonalbeli manuális folyamatok feltérképezése.
Ennek támogatására - a Techinicon-nal együttműködve - létrehozták az Universal Robots Monitoring App-ot, amely az összes modell Universal Robots-tól származó adatokat gyűjti.
Kezdő lépések a Technicon és az Universal robotok használatával
Többféle módon is be lehet juttatni az adatokat ebbe az alkalmazásba a Tulip API-k vagy akár egy OPC UA megoldás segítségével egy meglévő MES-ből. Lehetőség van azonban arra is, hogy a Technicon Gateway segítségével gyűjtsön információkat a robot működéséből, és továbbítsa azokat a Tulipba.
A Technicon Gateway zökkenőmentes csatlakozási lehetőséget kínál egy univerzális robothoz, csupán az eszköz konfigurálásával - anélkül, hogy magát a robotot az internetre kellene csatlakoztatni, vagy új szoftvert kellene telepíteni, ami megszakíthatná vagy akadályozhatná a meglévő megoldás kialakítását. Az adatok vezeték nélkül vagy mobilhálózaton keresztül küldhetők. A Technicon nagy tapasztalattal rendelkezik ennek az átjárónak a használatában az univerzális robotok, Fanuc robotok, Beckhoff PLC-k és Siemens PLC-k alaptechnológiáival.
Tulip integrációs beállítás
A Tulip gépfelügyeleti API-ja
A Tulip gépfelügyelet egy könnyen használható felületet kínál a gép aktuális állapotának megjelenítéséhez. Az alkalmazásban szerepel egy Universal Robot típusú gép, amely tartalmazza mind a 38 szabványos attribútumot, amelyek az Universal robotok minden modelljénél léteznek (például futás, megállás, szünet, hőmérséklet és az egyes robotcsuklók áramai).
A Tulip táblázat API-ja
Az alkalmazás több egyéni táblázatot használ, amelyek képesek összegyűjteni az univerzális robot attribútumait, állapotait és a naplózott eseményeket. Ezek a táblázatok automatikusan létrejönnek az App importálásával az Ön Tulip példányába.
ADevice Register a robotok manuális definiálására szolgál, beleértve az egyedi Machine API Table ID hozzárendelését. Ez a hivatkozás szükséges az API-k működéséhez.
Az UR Log lehetővé teszi az összes szabványos 38 attribútum összegyűjtését egyetlen táblázatsorként, így az adott pillanatban fennálló állapot elemezhető (pl. egy ízület hőmérséklete az árammal szemben).
Az Attribute Log lehetővé teszi az egyéni attribútumok gyűjtését, amelyeket saját maga kíván definiálni a gyűjtéshez, pl. robotprogram-változók.
Az eseménynapló lehetővé teszi az Ön által definiálandó és elemzendő egyéni események gyűjtését. Pl. "PauseButtonPressed"
Hogyan működik
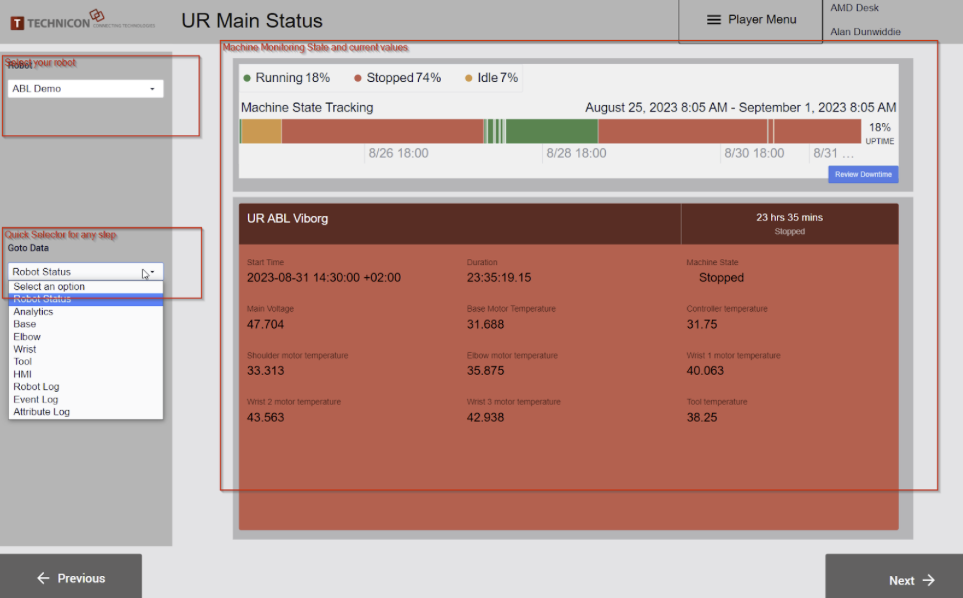
A funkcionális példa öt lépésből áll - mindegyikhez egy-egy funkcionalitás tartozik, hogy bemutassa a Tulip és az UR közötti integráció különböző aspektusait. Válassza ki a Robot menü segítségével a megfigyelni kívánt robotot a rendelkezésre álló gépek közül, majd a Goto Data menü segítségével válassza ki a lépést, amelyre ugrani kíván.
UR fő állapota
Ezen a lépésen a felhasználó láthatja a kiválasztott robot általános gépállapotát - a Tulip natív widgetjének használatával a rendelkezésre álló adatok megjelenítésére.
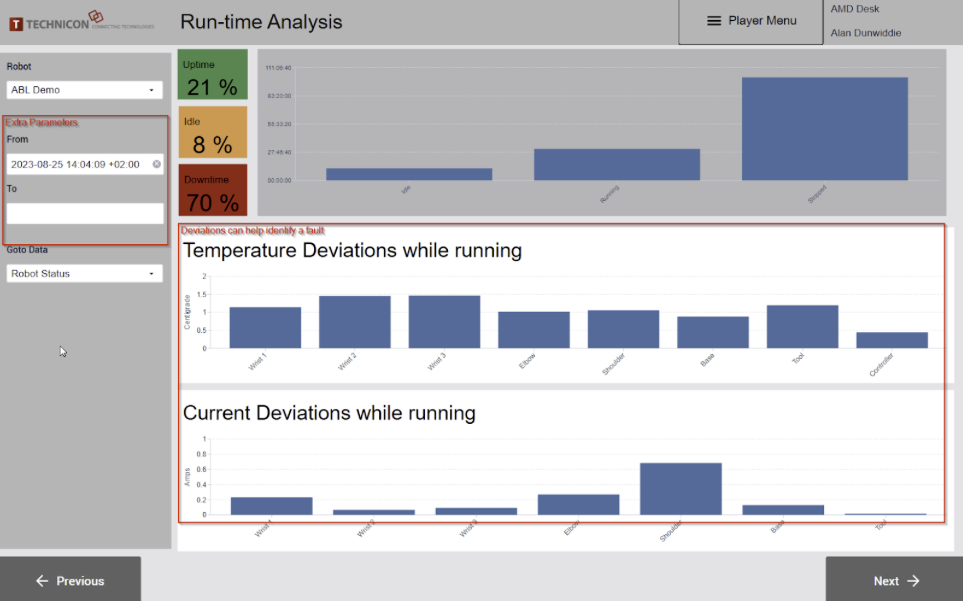
Futtatási idejű elemzés
Ez a lépés a kiválasztott robot futásidejű elemzését mutatja a megadott időkeretben. A Dátum és idő választó segítségével válassza ki az elemzési időkeretet.
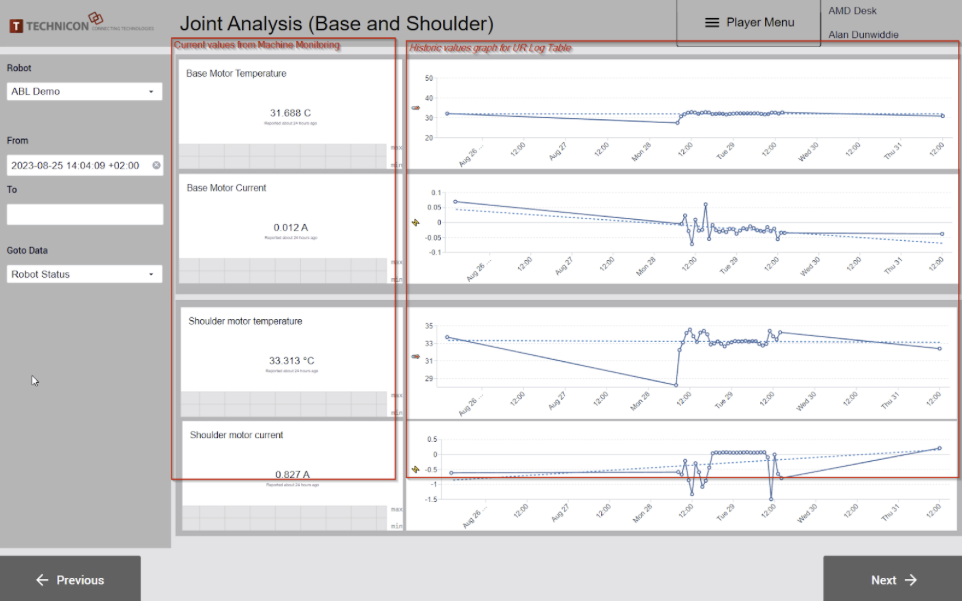
Közös elemzés
Ez a lépés segít a kiválasztott robot alapvető ízületi (alap és váll) adatainak nyomon követésében - az aktuális értékek és a múltbeli leolvasások grafikonon történő megjelenítésével.
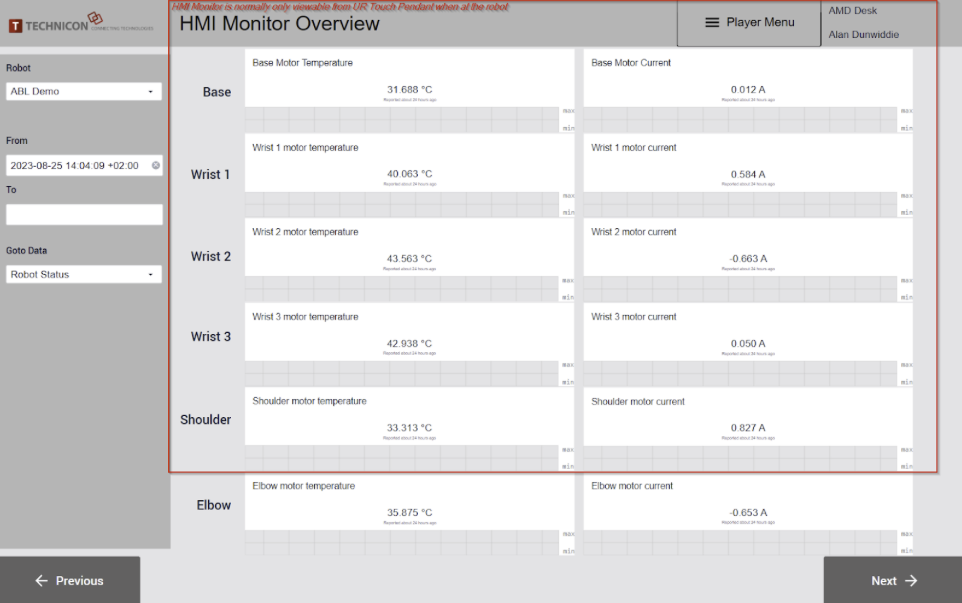
HMI monitor áttekintése
A HMI Monitor lépés részletes ízületi adatokat mutat a robot minden egyes ízületére vonatkozóan - beleértve a motor hőmérsékletét és az aktuális kijelzéseket.
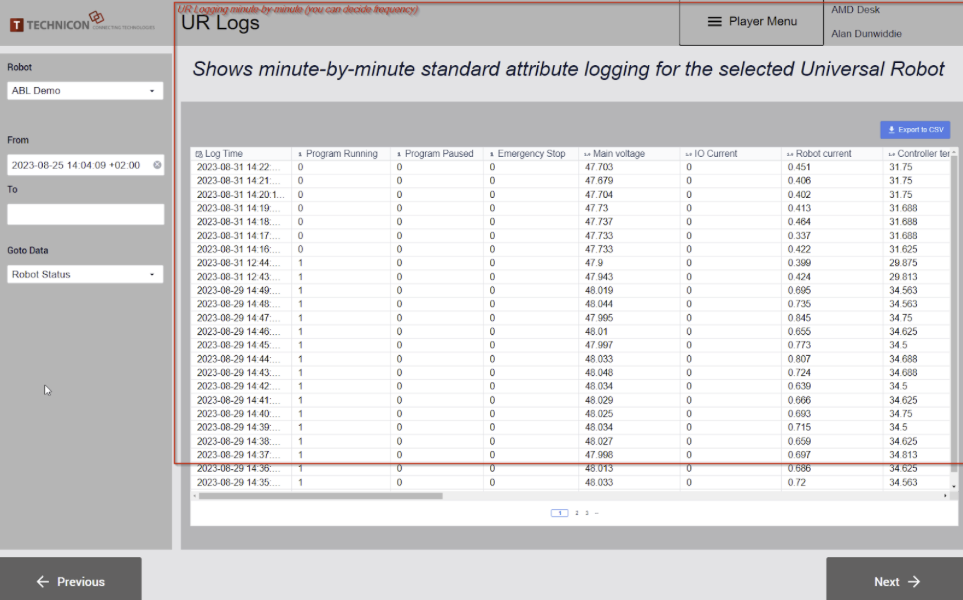
UR naplók
Ez a lépés percről percre mutatja a kiválasztott robot naplózott szabványos attribútumadatait.
A cikk a 'Universal Robot Monitoring with Tulip - Why and How Technicians Apply Tulip to Remotely Monitor Universal Robots (2023)' című cikk alapján készült.