
To download the app, visit: Library
:::Questo articolo spiega come raccogliere dati dagli Universal Robot (UR) utilizzando un'applicazione Tulip.
Scopo
Le soluzioni di automazione sono sempre più diffuse nell'industria. Le soluzioni stanno diventando sempre più complesse, ma la teoria generale rimane la stessa: svolgere compiti manuali e ripetitivi ad alta velocità e/o a basso tasso di errore, consentendo agli operatori umani di concentrarsi su lavori più interessanti e stimolanti. In questo senso, le soluzioni di automazione possono essere viste come un processo simile all'obiettivo di Tulip di mappare i processi manuali in prima linea.
A supporto di ciò, in collaborazione con Techinicon, è stata creata l'App di monitoraggio dei robot universali, che raccoglie i dati da tutti i modelli di robot universali.
Come iniziare con Technicon e i robot Universal
Esistono diversi modi per ottenere i dati in questa App, utilizzando le API Tulip o anche una soluzione OPC UA da un MES esistente. Tuttavia, è anche possibile utilizzare il gateway Technicon per raccogliere informazioni dal funzionamento del robot e inoltrarle a Tulip.
Il gateway Technicon offre un modo perfetto di collegarsi a un robot universale semplicemente configurando il dispositivo, senza la necessità di collegare il robot stesso a Internet o di installare un nuovo software che potrebbe interrompere o ostacolare il progetto di una soluzione esistente. I dati possono essere inviati in modalità wireless o tramite rete mobile. Technicon ha una grande esperienza nell'utilizzo di questo gateway con le sue tecnologie principali di robot Universal, robot Fanuc, PLC Beckhoff e PLC Siemens.
Configurazione dell'integrazione Tulip
API di monitoraggio macchina di Tulip
Il monitoraggio della macchina in Tulip offre un'interfaccia facile da usare per visualizzare lo stato attuale di una macchina. Nell'applicazione è inclusa una macchina di tipo Universal Robot che contiene tutti i 38 attributi standard che esistono su tutti i modelli di robot Universal (come funzionamento, arresto, pausa, temperature e correnti dei singoli giunti del robot).
API delle tabelle di Tulip
L'applicazione utilizza diverse tabelle personalizzate che possono raccogliere gli attributi dei robot Universal, gli stati e gli eventi registrati. Queste tabelle vengono create automaticamente importando l'applicazione nell'istanza Tulip.
Device Register serve a definire manualmente i robot, compresa l'assegnazione dell'ID unico della tabella API della macchina. Questo collegamento è necessario per il funzionamento delle API.
UR Log consente di raccogliere tutti gli attributi standard in una singola riga della tabella, in modo da poter analizzare lo stato in un determinato momento (ad esempio la temperatura di un giunto rispetto alla corrente).
Attribute Log consente la raccolta di attributi personalizzati che possono essere definiti dall'utente per la raccolta, ad esempio, di variabili del programma del robot.
IlRegistro eventi consente di raccogliere gli eventi personalizzati che si desidera definire e analizzare. Ad esempio, "Pulsante PausaPremuto".
Come funziona
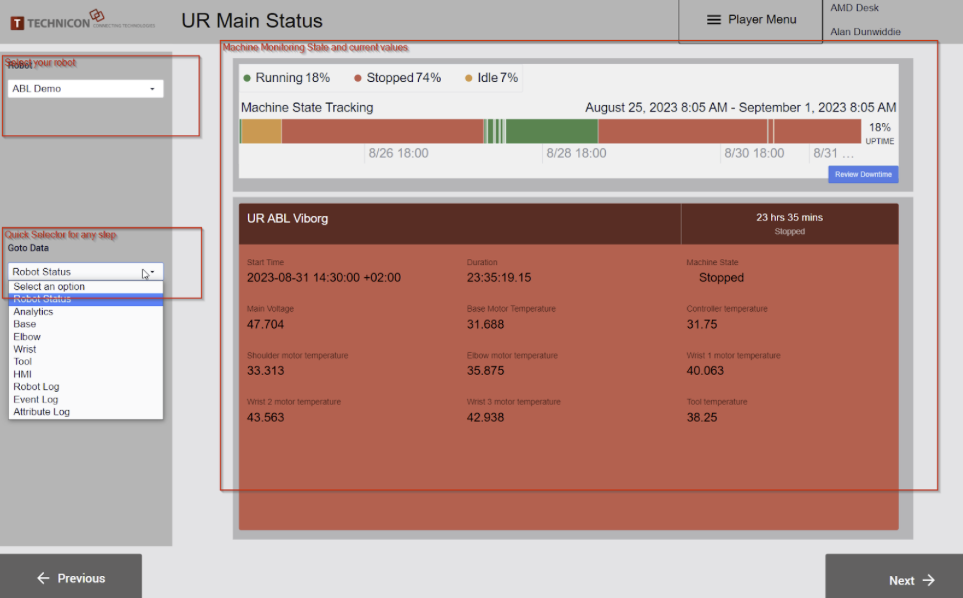
L'esempio funzionale si articola in cinque fasi, ognuna con una serie di funzionalità che illustrano diversi aspetti dell'integrazione tra Tulip e UR. Selezionare il robot da monitorare tra le macchine disponibili utilizzando il menu Robot e utilizzare il menu Goto Data per selezionare la fase a cui passare.
Stato principale di UR
In questa fase, l'utente può vedere lo stato generale della macchina del robot selezionato, utilizzando il widget nativo di Tulip per visualizzare i dati disponibili.
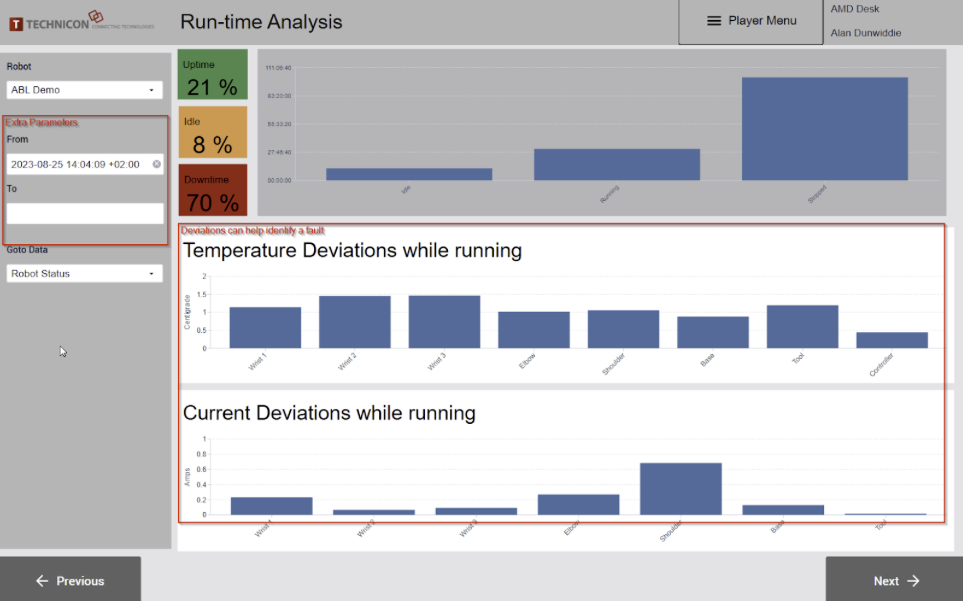
Analisi in tempo reale
Questa fase mostra un'analisi del tempo di esecuzione del robot selezionato per il periodo di tempo indicato. Utilizzare il selettore Data e ora per selezionare l'intervallo di tempo per l'analisi.
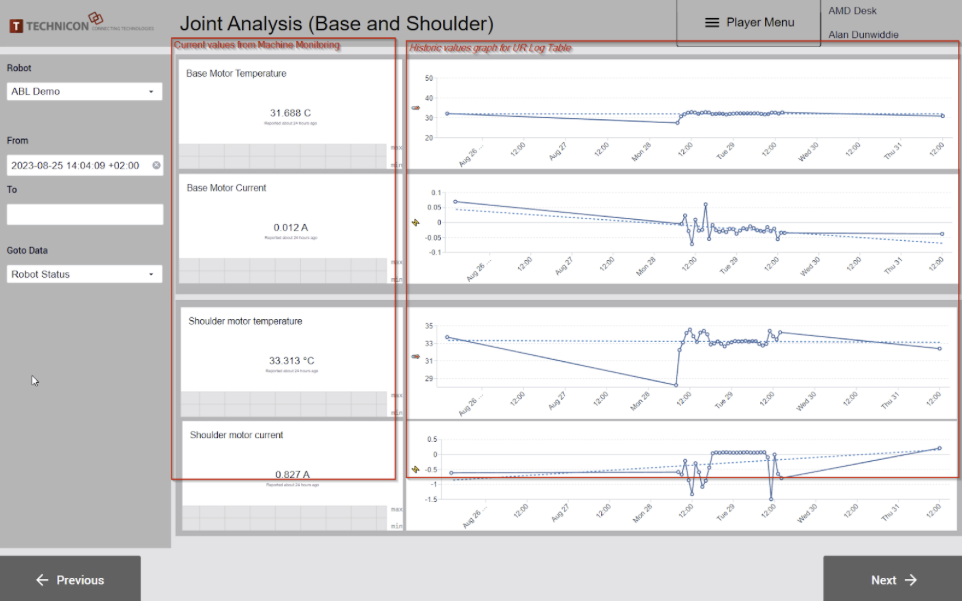
Analisi del giunto
Questa fase consente di monitorare i dati relativi alle articolazioni centrali (base e spalla) del robot selezionato, visualizzando su un grafico sia i valori attuali sia le letture storiche.
 {Altezza="" Larghezza=""}
{Altezza="" Larghezza=""}
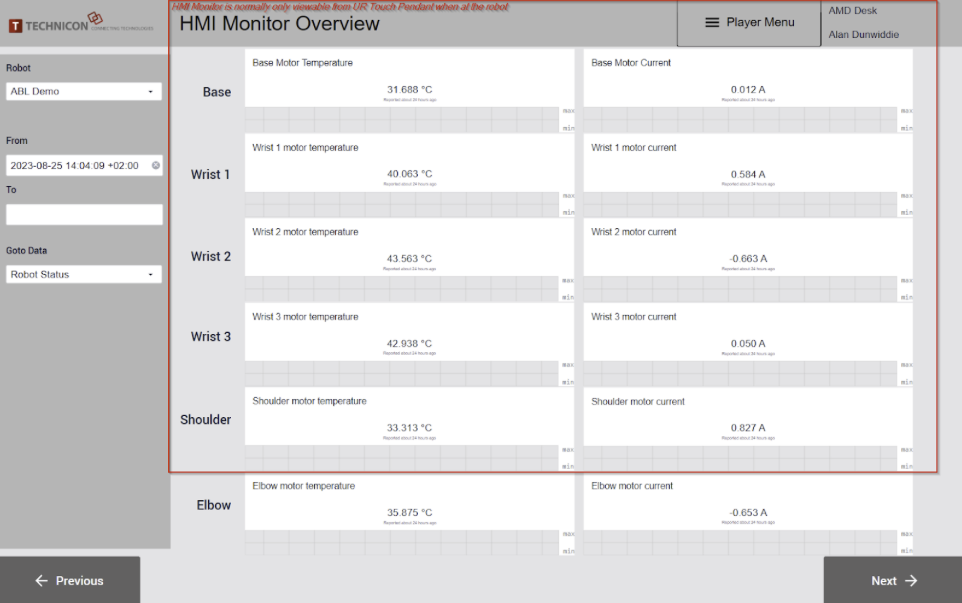
Panoramica del monitor HMI
Il passo HMI Monitor mostra i dati dettagliati di ogni giunto del robot, compresa la temperatura del motore e le letture correnti.
 {Altezza="" Larghezza=""}
{Altezza="" Larghezza=""}
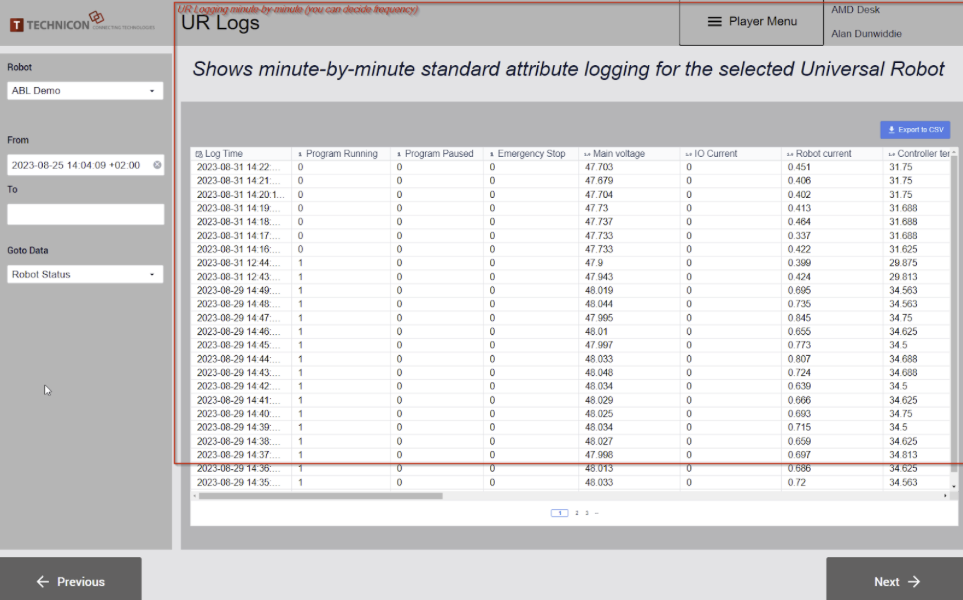
Registri UR
Questa fase mostra i dati degli attributi standard registrati per il robot selezionato, minuto per minuto.
L'articolo è stato scritto sulla base dell'articolo "Universal Robot Monitoring with Tulip - Why and How Technicians Apply Tulip to Remotely Monitoring Universal Robots (2023)".