
To download the app, visit: Library
Cet article explique comment collecter des données à partir de Robots Universels (UR) en utilisant une application Tulip.
Objectif
Les solutions d'automatisation sont de plus en plus répandues dans l'industrie. Les solutions deviennent également de plus en plus complexes, mais la théorie générale reste la même : entreprendre des tâches manuelles et répétitives à grande vitesse et/ou avec un faible taux d'erreur, libérant ainsi les travailleurs de première ligne pour qu'ils se concentrent sur des tâches plus intéressantes et plus stimulantes qu'ils apprécient. À cet égard, les solutions d'automatisation peuvent être considérées comme un processus similaire à l'objectif de Tulip de cartographier les processus manuels de première ligne.
Afin de soutenir ce processus, en coopération avec Techinicon, l'application de surveillance des robots universels a été créée et recueille les données de tous les modèles de robots universels.
Démarrer avec Technicon et les robots universels
Il y a plusieurs façons d'obtenir des données dans cette application en utilisant les API de Tulip ou même une solution OPC UA à partir d'un MES existant. Cependant, il est également possible d'utiliser la passerelle Technicon pour collecter des informations sur le fonctionnement du robot et les transmettre à Tulip.
Le Technicon Gateway permet de se connecter de manière transparente à un robot universel en configurant simplement l'appareil - sans qu'il soit nécessaire de connecter le robot lui-même à Internet ou d'installer un nouveau logiciel susceptible d'interrompre ou d'entraver la conception d'une solution existante. Les données peuvent être envoyées sans fil ou via un réseau mobile. Technicon a une grande expérience dans l'utilisation de cette passerelle avec ses technologies de base que sont les robots Universal, les robots Fanuc, les automates Beckhoff et les automates Siemens.
Intégration de Tulip
L'API de surveillance des machines de Tulip
La surveillance des machines dans Tulip offre une interface facile à utiliser pour afficher l'état actuel d'une machine. Une machine de type Robot Universel est incluse dans l'application qui contient les 38 attributs standards qui existent sur tous les modèles de robots universels (tels que la marche, l'arrêt, la pause, les températures et les courants des articulations individuelles du robot).
L'API des tables de Tulip
L'application utilise plusieurs tables personnalisées qui peuvent collecter les attributs des robots Universal, les états et les événements enregistrés. Ces tables seront automatiquement créées lors de l'importation de l'application dans votre Instance Tulip.
Device Register permet de définir manuellement vos robots, y compris l'attribution de l'identifiant unique de la table API de la machine. Ce lien est nécessaire pour que les API fonctionnent.
UR Log permet de collecter tous les attributs standard sous la forme d'une seule ligne de tableau, de sorte que l'état à un moment donné peut être analysé (par exemple, la température d'une articulation par rapport au courant).
Attribute Log permet de collecter des attributs personnalisés que vous pouvez définir vous-même, par exemple les variables du programme du robot.
Lejournal des événements permet de collecter les événements personnalisés que vous souhaitez définir et analyser. Par exemple, "PauseButtonPressed".
Fonctionnement
L'exemple fonctionnel comporte cinq étapes - chacune avec un ensemble de fonctionnalités pour présenter différents aspects de l'intégration entre Tulip et UR. Sélectionnez le robot à surveiller parmi les machines disponibles à l'aide du menu Robot et utilisez le menu Goto Data pour sélectionner l'étape à laquelle passer.
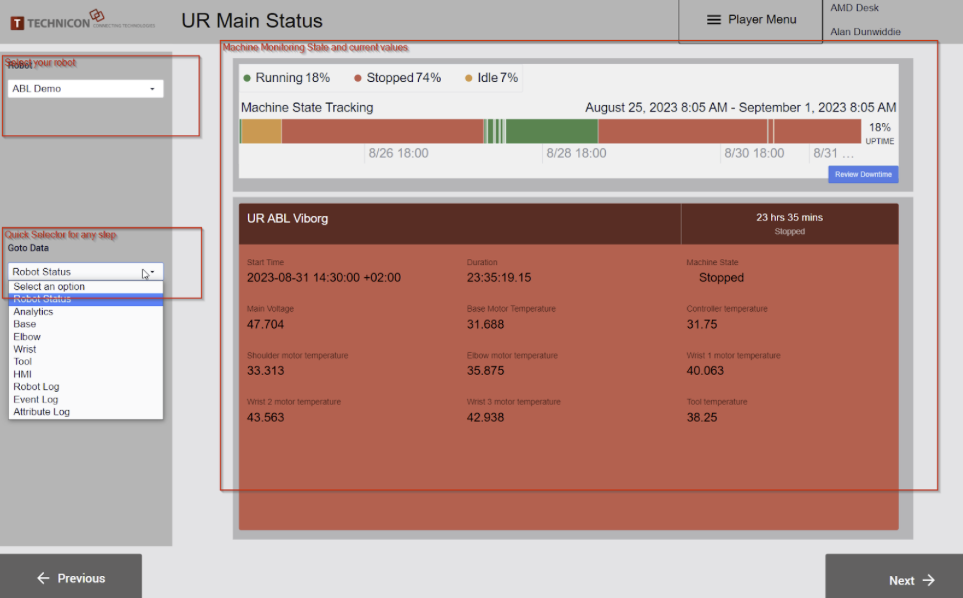
UR Main Status (État principal de l'UR)
Dans cette étape, l'utilisateur peut voir l'état général de la machine du robot sélectionné - en utilisant le widget natif de Tulip pour afficher les données disponibles.
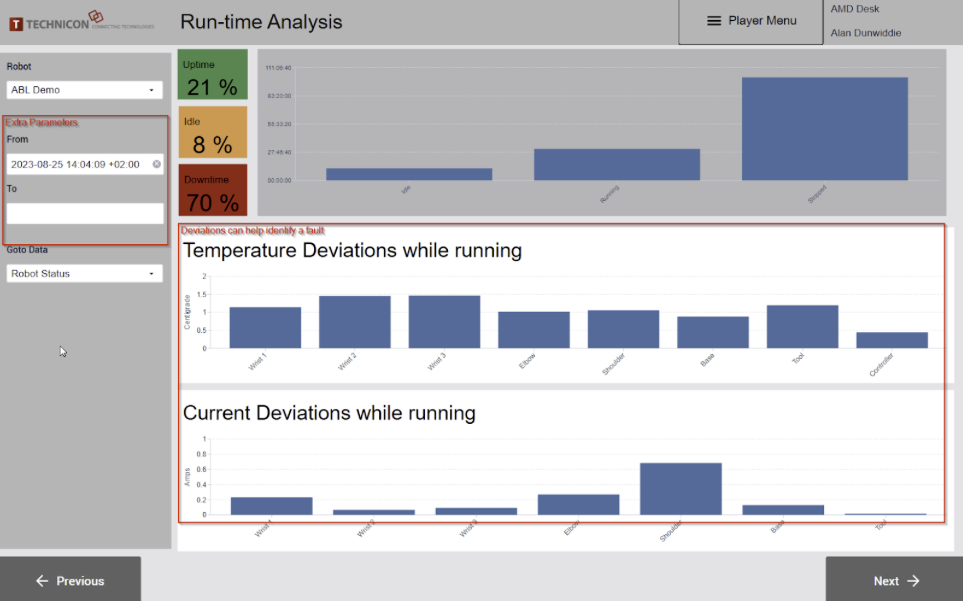
Analyse du temps d'exécution
Cette étape montre une analyse du temps de fonctionnement du robot sélectionné pour la période donnée. Utilisez le sélecteur de date et d'heure pour sélectionner la période de l'analyse.
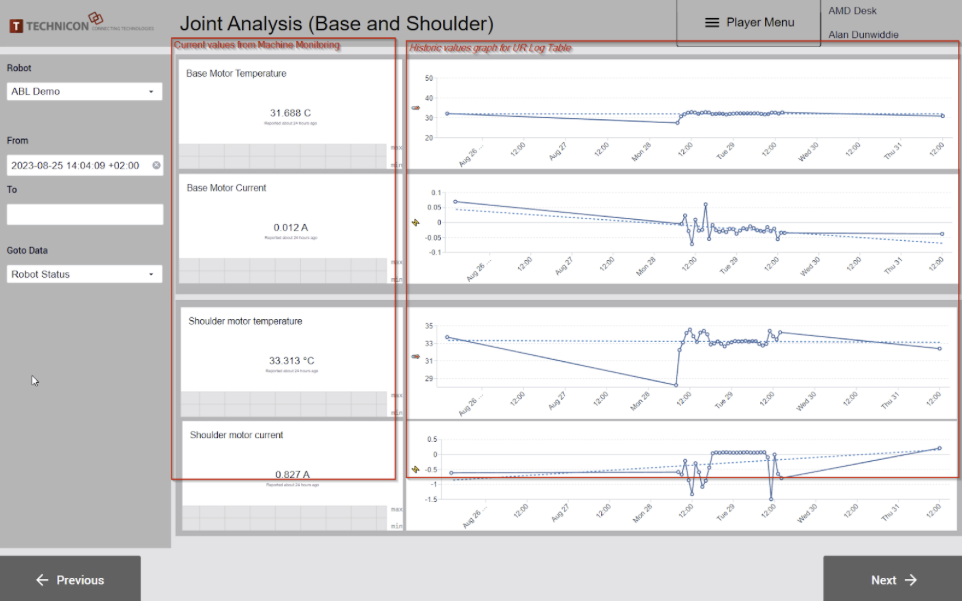
Analyse des articulations
Cette étape permet de surveiller les données des articulations principales (base et épaule) du robot sélectionné, en affichant les valeurs actuelles et les données historiques sur un graphique.
 {Cette étape permet de contrôler les données des articulations centrales (base et épaule) du robot sélectionné, en affichant les valeurs actuelles et l'historique sur un graphique.
{Cette étape permet de contrôler les données des articulations centrales (base et épaule) du robot sélectionné, en affichant les valeurs actuelles et l'historique sur un graphique.
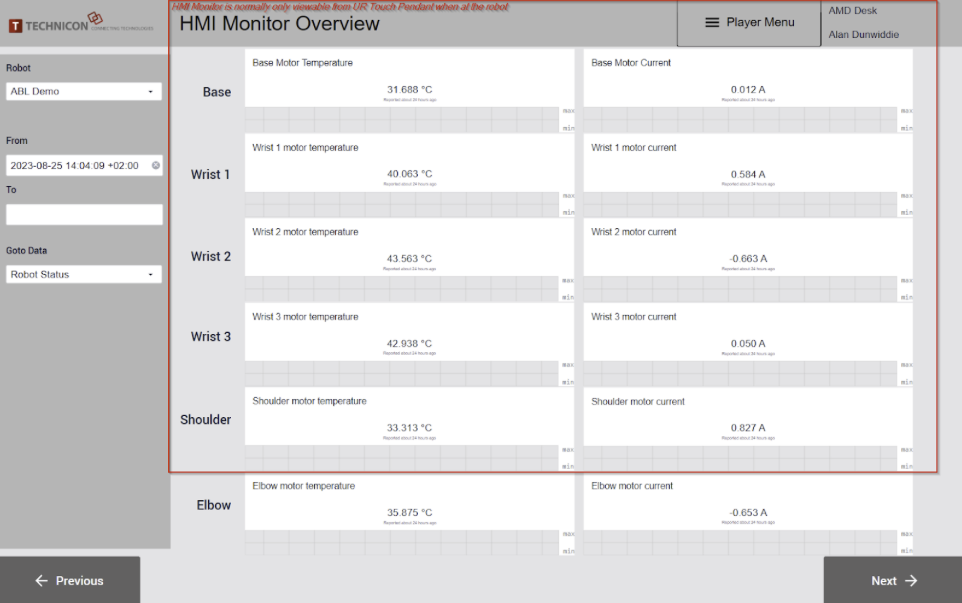
Présentation du moniteur IHM
L'étape Moniteur IHM affiche des données détaillées pour chaque articulation du robot, y compris la température du moteur et les valeurs actuelles.
 {L'étape HMI Monitor affiche des données détaillées sur chaque articulation du robot, y compris la température du moteur et les relevés de courant.}
{L'étape HMI Monitor affiche des données détaillées sur chaque articulation du robot, y compris la température du moteur et les relevés de courant.}
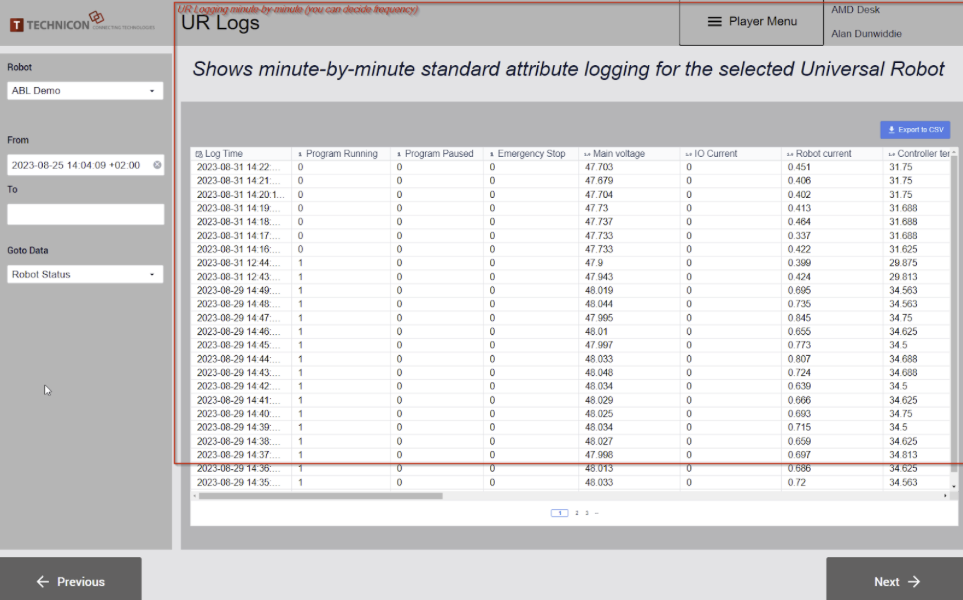
Journaux UR
Cette étape affiche les données d'attributs standard consignées pour le robot sélectionné, minute par minute.
Cet article a été rédigé à partir de l'article 'Universal Robot Monitoring with Tulip - Why and How Technicians Apply Tulip to Remotely Monitor Universal Robots (2023)'.