
To download the app, visit: Library
:::Este artigo explica como coletar dados de robôs universais (UR) usando um aplicativo Tulip
Objetivo
As soluções de automação estão se tornando cada vez mais predominantes no setor. As soluções também estão se tornando cada vez mais complexas, mas a teoria geral permanece a mesma: realizar tarefas manuais e repetitivas com alta velocidade e/ou baixas taxas de erro, liberando os funcionários humanos da linha de frente para se concentrarem no trabalho mais interessante e desafiador de que gostam. Nesse sentido, as soluções de automação podem ser vistas como um processo semelhante ao objetivo da Tulip de mapear os processos manuais da linha de frente.
Para dar suporte a isso - em cooperação com a Techinicon - foi criado o aplicativo de monitoramento de robôs universais, que reúne dados de robôs universais de todos os modelos.
Primeiros passos com a Technicon e os robôs universais
Há várias maneiras diferentes de obter dados para esse aplicativo usando APIs da Tulip ou até mesmo uma solução OPC UA de um MES existente. No entanto, também é possível usar o Technicon Gateway para coletar informações da operação do robô e encaminhá-las para a Tulip.
O Technicon Gateway oferece uma maneira perfeita de se conectar a um robô universal apenas configurando o dispositivo - sem a necessidade de conectar o próprio robô à Internet ou instalar um novo software que poderia quebrar ou impedir um projeto de solução existente. Os dados podem ser enviados sem fio ou via rede móvel. A Technicon tem muita experiência no uso desse gateway com suas principais tecnologias de robôs universais, robôs Fanuc, CLPs Beckhoff e CLPs Siemens.
Configuração de integração da Tulip
API de monitoramento de máquinas da Tulip
O Machine Monitoring na Tulip oferece uma interface fácil de usar para exibir o estado atual de uma máquina. Uma máquina do tipo Robô Universal está incluída no aplicativo e contém todos os 38 atributos padrão que existem em todos os modelos de robôs universais (como funcionamento, parada, pausa, temperaturas e correntes de juntas individuais do robô).
API de tabela da Tulip
O aplicativo está usando várias tabelas personalizadas que podem coletar atributos, estados e eventos registrados do robô Universal. Essas tabelas serão criadas automaticamente ao importar o aplicativo para sua instância da Tulip.
O Device Register (Registro de dispositivo ) serve para definir seus robôs manualmente, incluindo a atribuição do ID exclusivo da tabela API da máquina. Esse link é necessário para que as APIs funcionem.
UR Log permite a coleta de todos os 38 atributos padrão como uma única linha de tabela, de modo que o estado em um determinado momento possa ser analisado (por exemplo, a temperatura de uma junta versus a corrente).
O Attribute Log permite a coleta de atributos personalizados que você mesmo pode definir para coleta, por exemplo, variáveis do programa do robô.
O registro de eventos permite a coleta de eventos personalizados que você deseja definir e analisar. Por exemplo, "PauseButtonPressed" (botão de pausa pressionado)
Como funciona
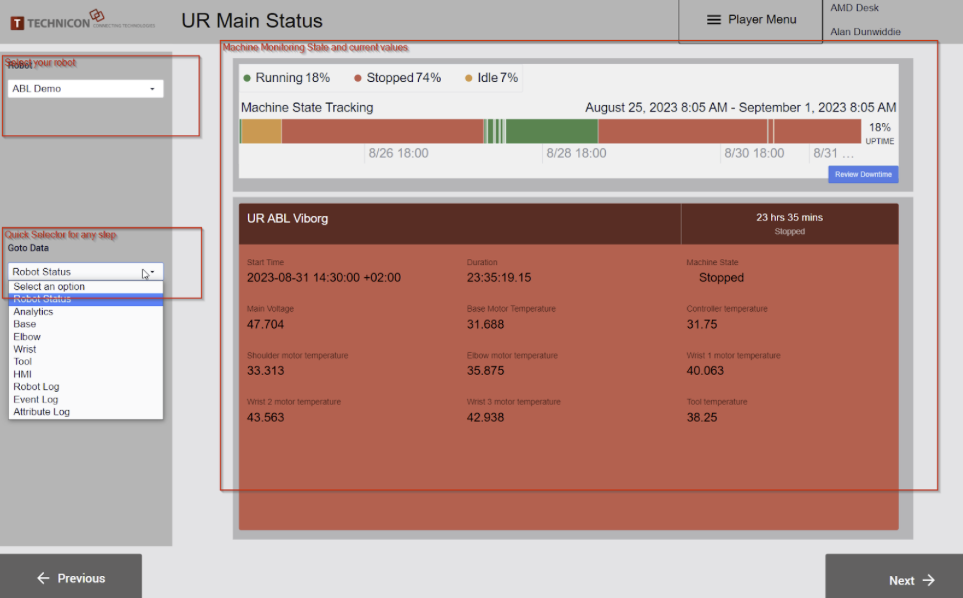
O Exemplo Funcional tem cinco etapas - cada uma com um conjunto de funcionalidades para demonstrar diferentes aspectos da integração entre a Tulip e o UR. Selecione o robô a ser monitorado entre as máquinas disponíveis usando o menu Robot (Robô ) e use o menu Goto Data (Ir para dados ) para selecionar a etapa para a qual deseja ir.
Status principal do UR
Nesse passo, o usuário pode ver o status geral da máquina do robô selecionado - usando o widget nativo da Tulip para exibir os dados disponíveis.
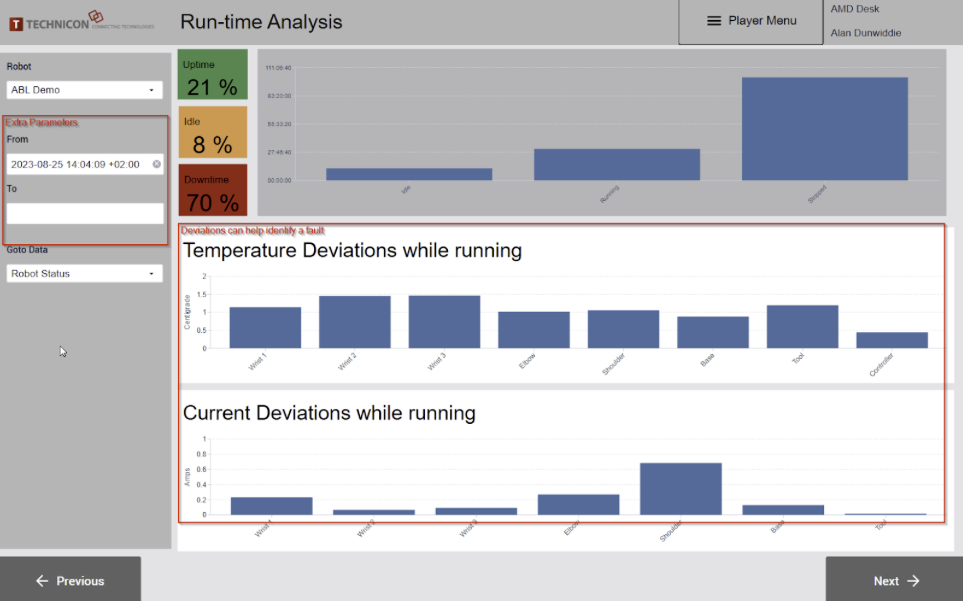
Análise de tempo de execução
Esta etapa mostra uma análise de tempo de execução do robô selecionado para o período de tempo determinado. Use o seletor de Data e Hora para selecionar o período de tempo para a análise.
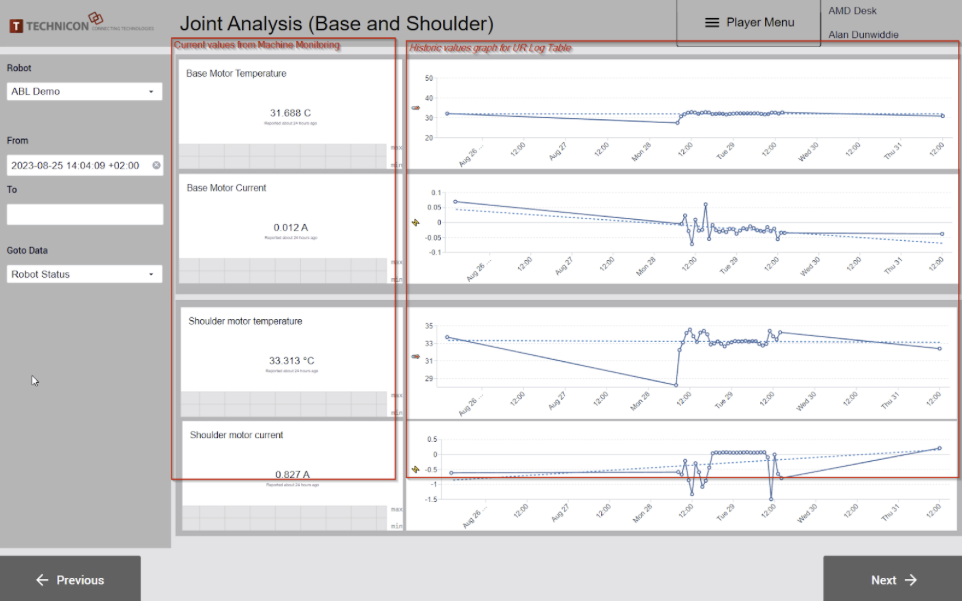
Análise da junta
Essas etapas ajudam a monitorar os dados da articulação central (Base e Ombro) do robô selecionado, exibindo os valores atuais e as leituras históricas em um gráfico.
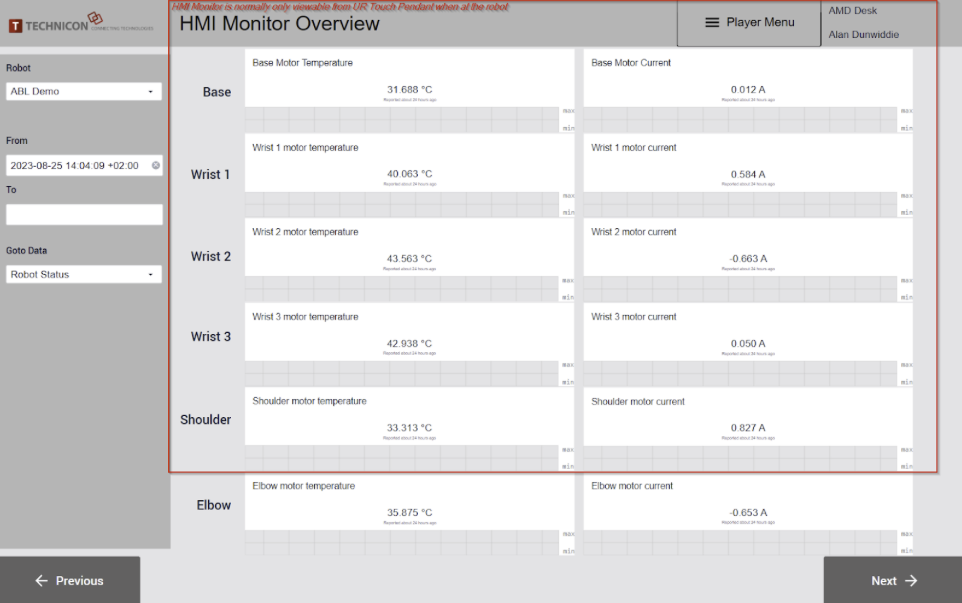
Visão geral do HMI Monitor
A etapa do HMI Monitor mostra dados detalhados da articulação para cada articulação do robô, incluindo a temperatura do motor e as leituras atuais.
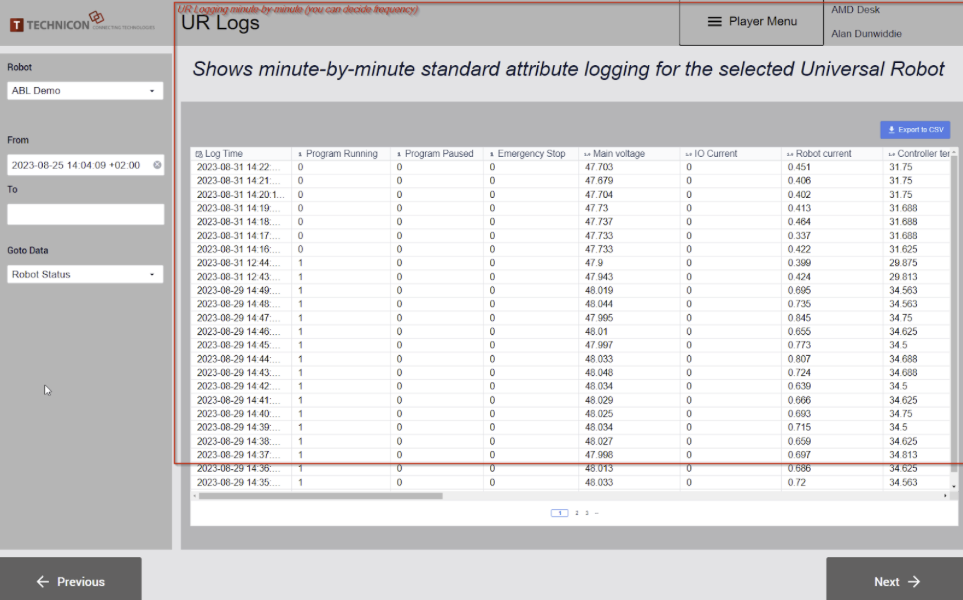
Registros UR
Essa etapa mostra dados de atributos padrão registrados para o robô selecionado, minuto a minuto.
O artigo foi escrito com base no artigo 'Universal Robot Monitoring with Tulip - Why and How Technicians Apply Tulip to Remotely Monitor Universal Robots (2023)'.