
To download the app, visit: Library
:::Este artículo explica cómo recopilar datos de Robots Universales (UR) utilizando una Tulip App
Propósito
Las soluciones de automatización son cada vez más frecuentes en la industria. Las soluciones también se están volviendo cada vez más complejas, pero la teoría general sigue siendo la misma: realizar tareas manuales y repetitivas con alta velocidad y/o bajos índices de error, liberando a los trabajadores humanos de primera línea para que se centren en el trabajo más interesante y desafiante que disfrutan. En este sentido, las soluciones de automatización pueden considerarse un proceso similar al objetivo de Tulip de mapear los procesos manuales de primera línea.
Para ello, en colaboración con Techicon, se ha creado la aplicación Universal Robots Monitoring App, que recopila datos de todos los modelos de Universal Robots.
Primeros pasos con Technicon y los robots Universal
Hay varias maneras diferentes de obtener datos en esta aplicación utilizando las API de Tulip o incluso una solución OPC UA de un MES existente. Sin embargo, también es posible utilizar la puerta de enlace Technicon para recopilar información del funcionamiento del robot y reenviarla a Tulip.
La pasarela Technicon Gateway ofrece una forma sencilla de conectarse a un robot universal con sólo configurar el dispositivo, sin necesidad de conectar el propio robot a Internet ni de instalar un nuevo software que podría romper o entorpecer el diseño de una solución existente. Los datos pueden enviarse de forma inalámbrica o a través de una red móvil. Technicon tiene mucha experiencia en el uso de esta pasarela con sus tecnologías principales de Universal Robots, Fanuc Robots, Beckhoff PLCs y Siemens PLCs.
Configuración de integración de Tulip
API de Monitoreo de Máquinas de Tulip
El monitoreo de máquinas en Tulip ofrece una interfaz fácil de usar para mostrar el estado actual de una máquina. Una máquina de tipo Robot Universal se incluye en la aplicación que contiene todos los 38 atributos estándar que existen en todos los modelos de robots Universales (como en marcha, parado, en pausa, temperaturas y corrientes de las articulaciones individuales del robot).
API de tablas de Tulip
La aplicación utiliza varias tablas personalizadas que pueden recopilar los atributos, estados y eventos registrados de los robots Universal. Estas tablas se crearán automáticamente al importar la aplicación a su instancia de Tulip.
El Registro de dispositivos sirve para definir los robots manualmente, incluida la asignación del ID de tabla API de máquina exclusivo. Este enlace es necesario para que funcionen las API.
UR Log permite recopilar todos los atributos estándar 38 como una única fila de tabla, de forma que se pueda analizar el estado en un momento dado (por ejemplo, la temperatura de una articulación frente a la corriente).
El registro de atributos permite la recopilación de atributos personalizados que puede definir usted mismo para recopilar, por ejemplo, variables del programa del robot.
Registro de Eventos permite la recolección de eventos personalizados que usted desee definir y analizar. Ej. "BotónPausaPulsado".
Funcionamiento
El Ejemplo Funcional tiene cinco pasos - cada uno con un conjunto de funcionalidades para mostrar diferentes aspectos de la integración entre Tulip y UR. Seleccione el robot a monitorizar de entre las máquinas disponibles utilizando el menú Robot y utilice el menú Goto Data para seleccionar el paso al que saltar.
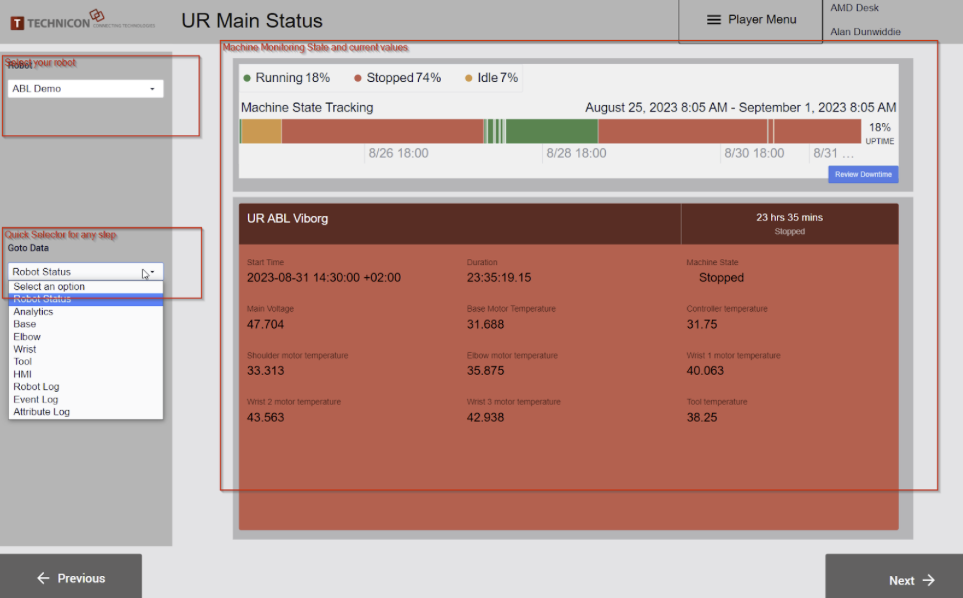
Estado principal de UR
En este paso, el usuario puede ver el estado general de la máquina del robot seleccionado - utilizando el widget nativo de Tulip para mostrar los datos disponibles.
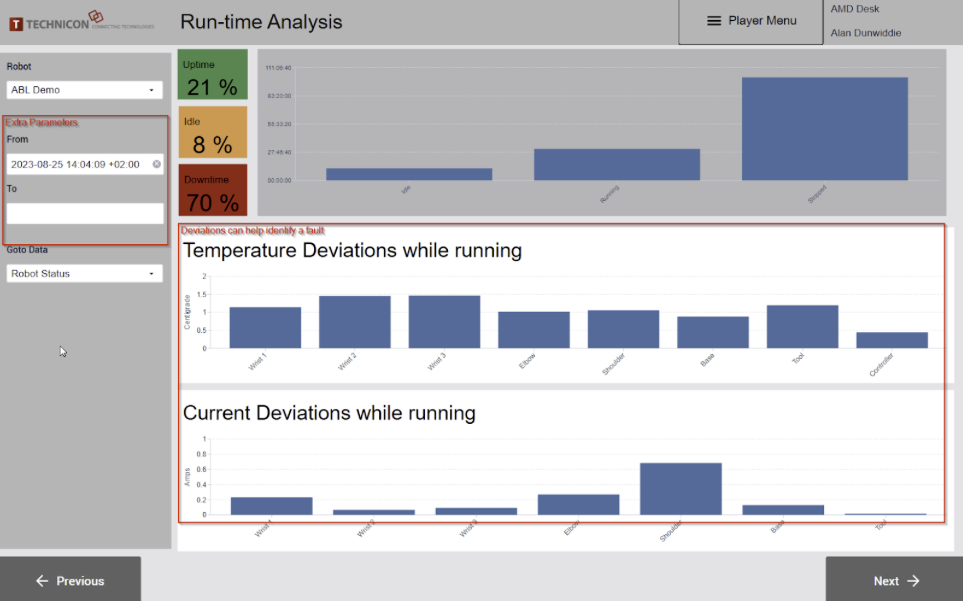
Análisis en tiempo de ejecución
Este paso muestra un análisis del tiempo de ejecución del robot seleccionado para el periodo de tiempo dado. Utilice el selector Fecha y hora para seleccionar el marco temporal del análisis.
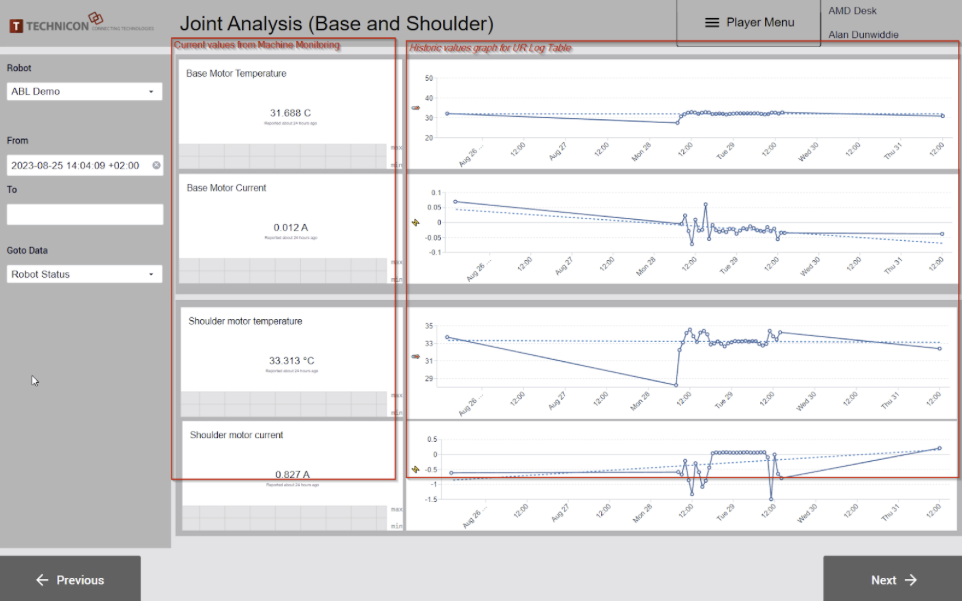
Análisis de articulaciones
Este paso ayuda a monitorizar los datos de las articulaciones principales (base y hombro) del robot seleccionado, mostrando tanto los valores actuales como las lecturas históricas en un gráfico.
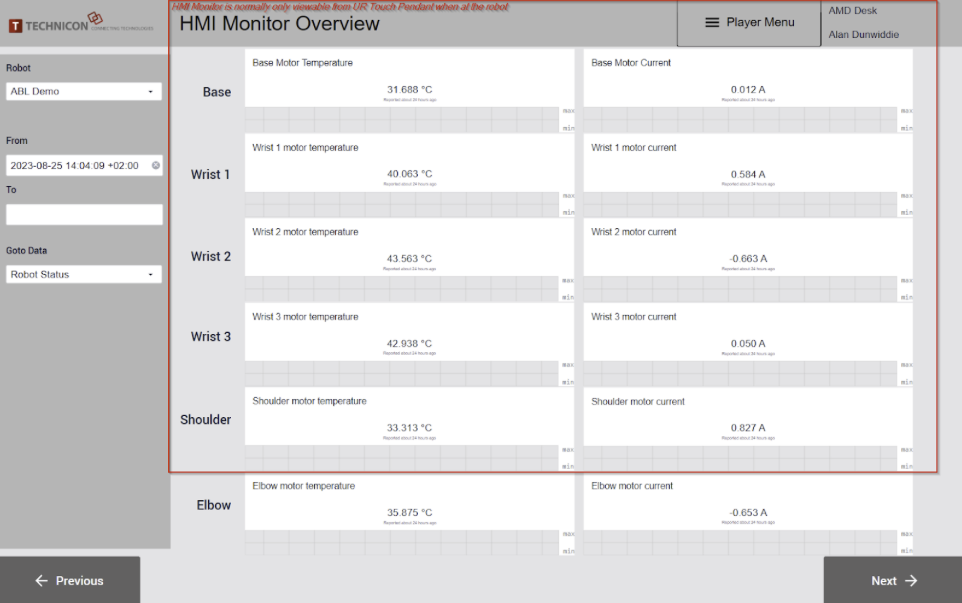
Visión General del Monitor HMI
El paso Monitor HMI muestra los datos detallados de cada articulación del robot, incluyendo la temperatura del motor y las lecturas actuales.
 {Altura="" anchura=""}
{Altura="" anchura=""}
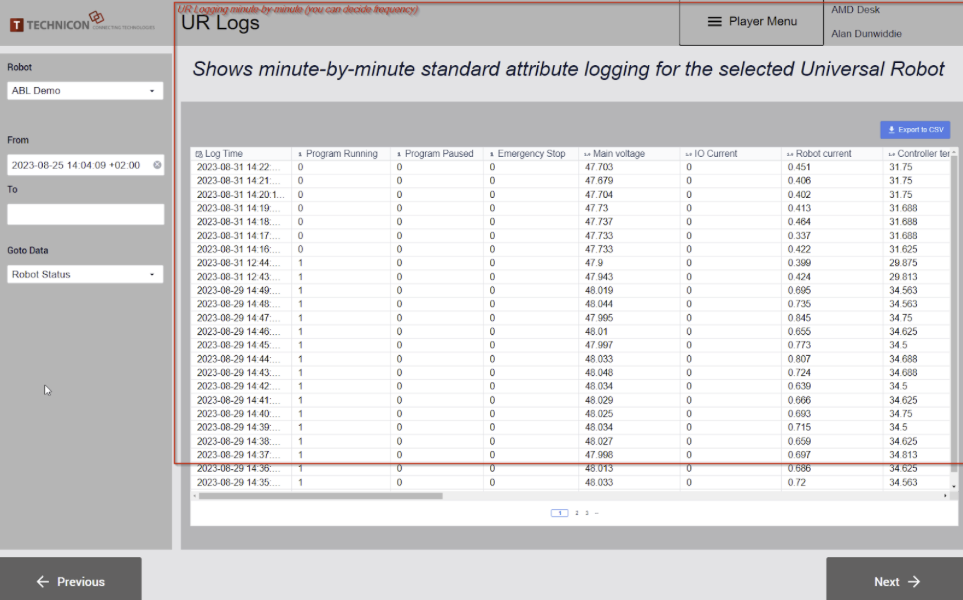
Registros UR
Este paso muestra los datos de atributos estándar registrados para el robot seleccionado minuto a minuto.
El artículo fue escrito en base al artículo 'Universal Robot Monitoring with Tulip - Why and How Technicians Apply Tulip to Remotely Monitor Universal Robots (2023)'.