Using the Torque Open Protocol Driver
- 05 Jan 2024
- 4 Minutes to read
- Contributors




- Print
Using the Torque Open Protocol Driver
- Updated on 05 Jan 2024
- 4 Minutes to read
- Contributors
- Print
Article Summary
Share feedback
Thanks for sharing your feedback!
A guide to the Torque-OP Driver
Overview
The Torque Open Protocol driver (or Torque-OP) on Tulip Edge Devices is able to communicate with devices that support the Atlas Copco Open Protocol specification.
While Atlas Copco was the company that created this standard, many manufacturers support this standard protocol. This driver has been tested with torque controllers from:
- Atlas Copco
- Cleco
- Ingersoll Rand
- Stanley-Black & Decker
- Desoutter
- Kolver K-Ducer
To determine if your torque controller supports this protocol, refer to your product's manual or contact your sales or distribution representative. Note that there are some brand-specific resources at the bottom of this article.
The Torque-OP driver supports the following functions:
- Sending an "Enable Tool" command to the controller.
- Sending a "Disable Tool" command to the controller.
- Sending a "Set Parameter Set ID" command to the controller.
- Sending a "Set Job ID" command to the controller.
- Receiving a "Tool Status" message from the controller that indicates if the controller is enabled or disabled.
- Receiving a "Tightening Event" message from the controller that includes information about the last tightening event such as torque, angle, and whether all of the measurements were in range.
- Receiving a “Trace Data” message from the controller that includes the trace curve data for one trace type from the last tightening. One message will output per trace type. Select which trace types to capture in the driver configuration (only select trace types compatible with your device). Note: this data type has only been verified for Kolver compatibility mode.
NOTE: The Torque Open Protocol Driver is only available with limited functionality in I/O Gateway v1.1.0 and later. Support for selecting a port in the configuration menu, requesting a Parameter Set, and receiving Extended Tightening Data are available in I/O Gateway v1.3.2 and later.
Use this guide to check your Edge Device's OS version
Using the Driver
This driver requires the use of a Tulip Edge Device. To use the driver, you must first configure the Torque-OP driver on the Edge Device and then create a Tulip App that uses this connection.
Enable the Driver on your Edge Device
First, ensure that your Torque Controller is connected to the same network as your Edge Device. The Edge Device will create a connection to your torque controller over the network.
Then, access the Device Portal's Driver Configuration Page and select the "Torque-OP" Driver menu.
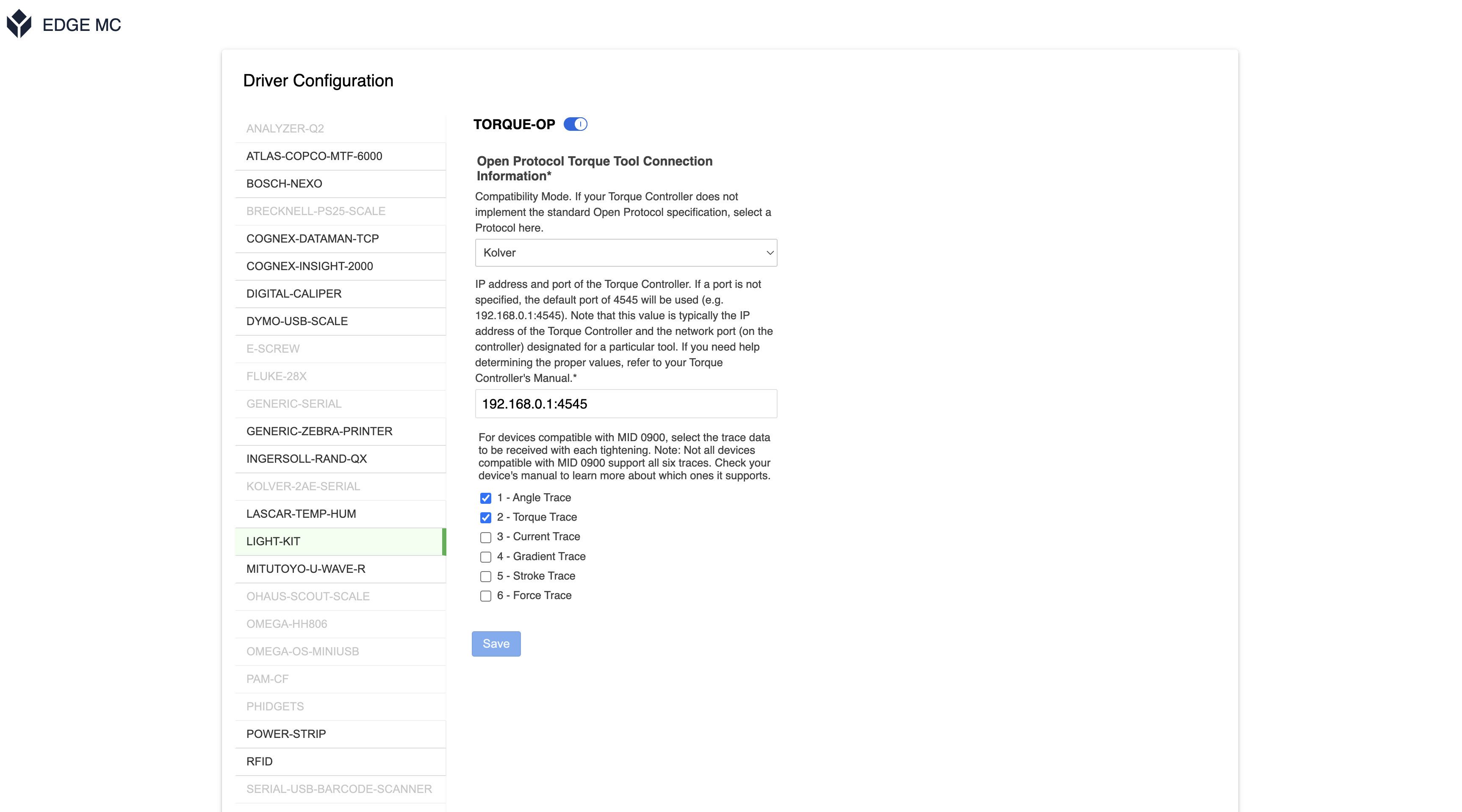
Here, you must specify the IP address and port of your Torque Controller's Open Protocol server.
If you have questions about how to enable the Torque Open Protocol server on your torque controller, please refer to your product's manual or contact your sales or distribution representative.
Create a Tulip App
The next step is to create a Tulip app that uses this driver.
Create an app and then use triggers to interact with the driver.
There are two types of trigger events that this driver supports.
The first type is a command to send information to the Torque Controller. These commands are sent in a Trigger Action. You can see the supported event types in the image below.
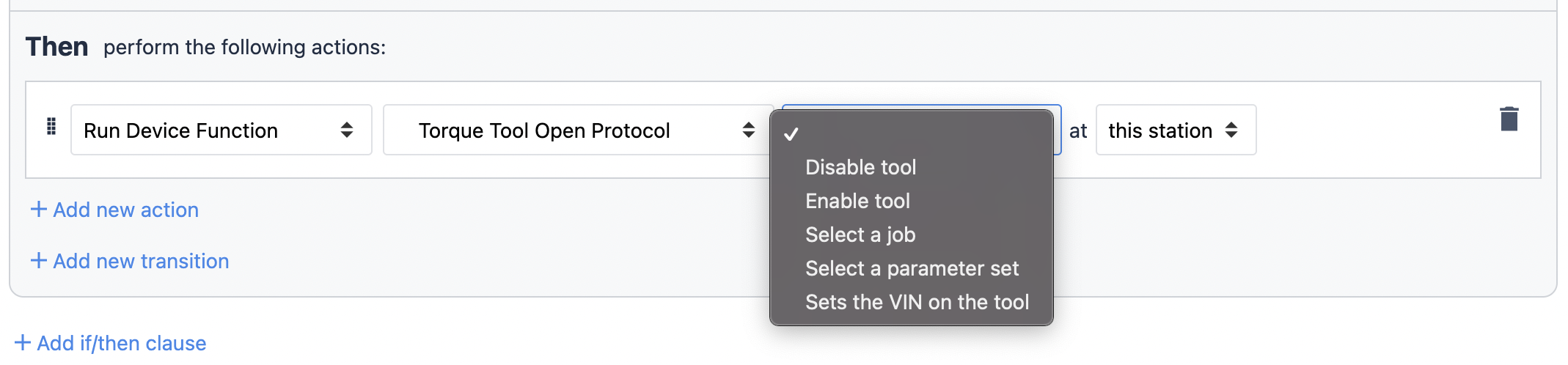
THEN
- "Run Device Function" "Torque Tool Open Protocol" (select the action)
Each command will then prompt you for the necessary information related to that command.
The second type of trigger event is to receive data from the torque controller. These triggers are only available as "Step Triggers" in the "When" clause. Note the options below:
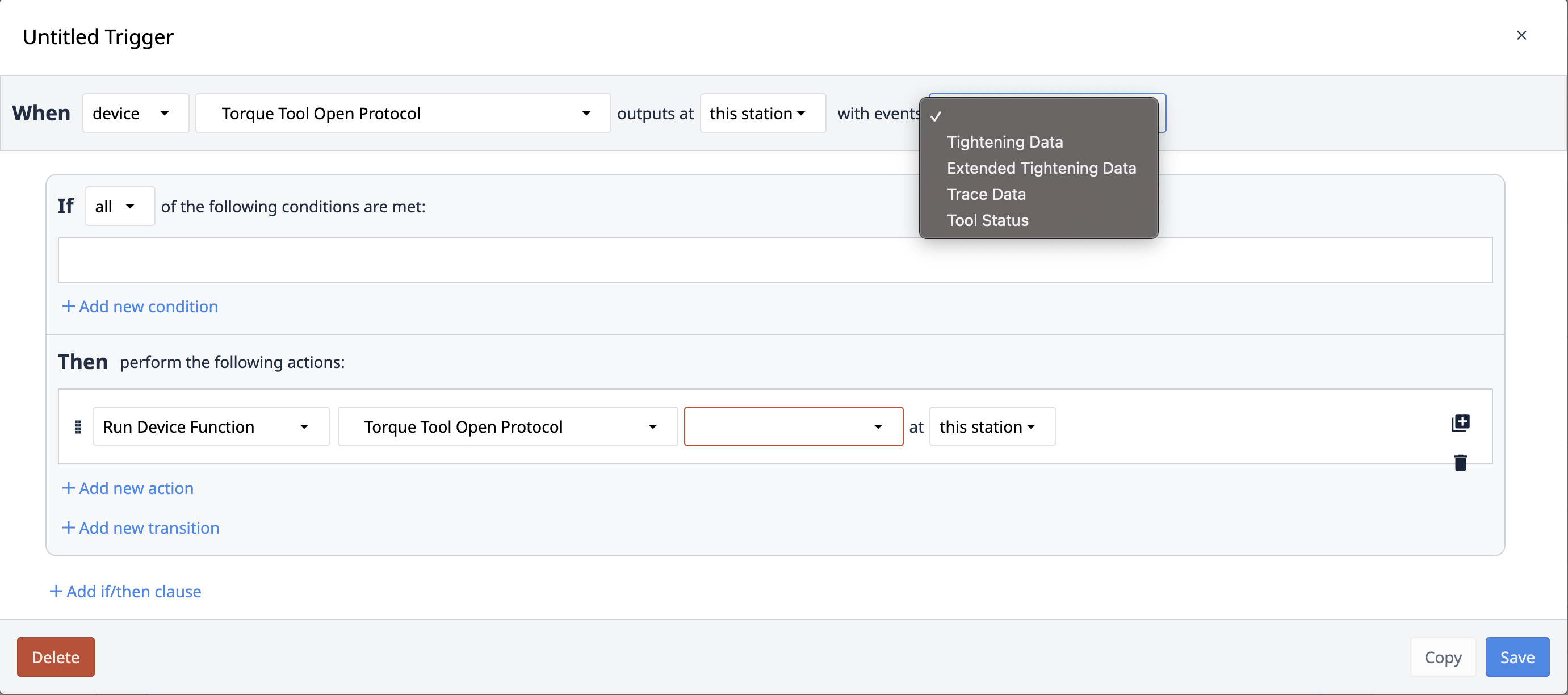
WHEN
- "device" "Torque Tool Open Protocol" outputs as "this station" "with events"...
Here, the "Tightening Data" event will include the torque value and whether or not the torque measurement was within the acceptable range.
The "Extended Tightening Data" event includes much more information, but might not be applicable for all use cases.
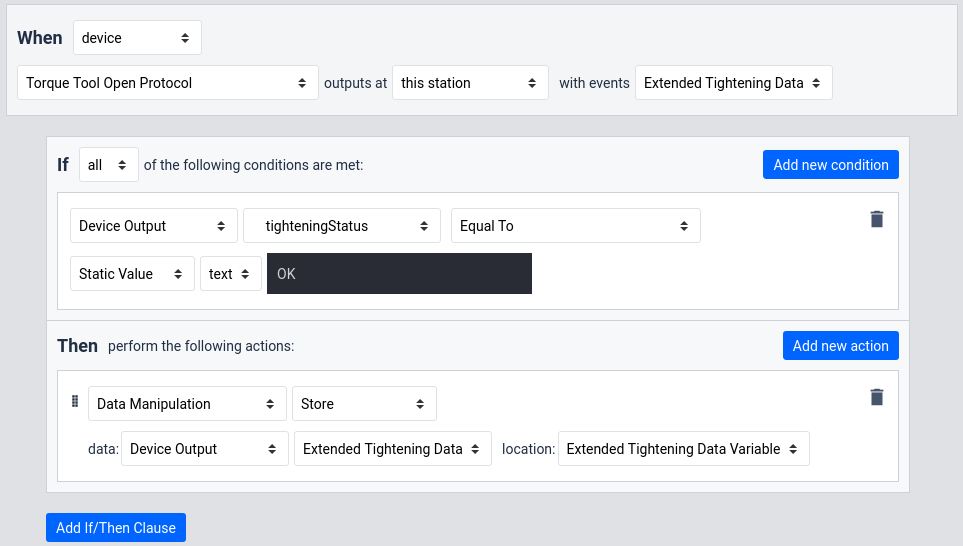
For both events, the Device Output is then available within the Trigger to be used in a variety of situations. In the image below, there is a trigger that uses one property of the Device Output immediately and also stores the Device Output for later retrieval.
Video Walkthrough
A short video walkthrough is included below.
Notes for the Cleco mPro400GC
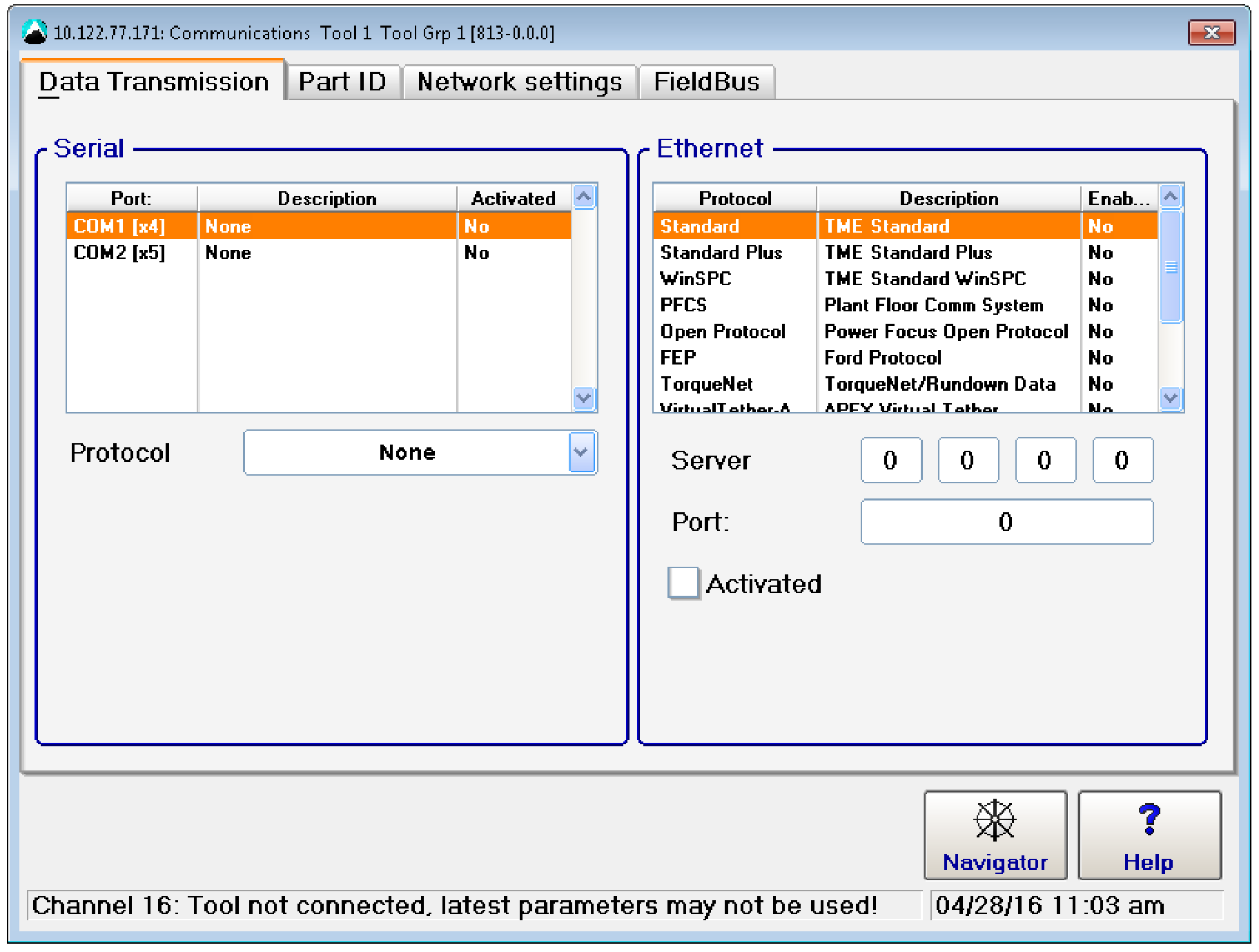
To use your Cleco mPro400GC with Tulip, you will need to first enable Open Protocol by selecting Navigator -> Communications -> Data Transmission and then enabling "Open Protocol" on the menu below:
After enabling the protocol, select the "Advanced" tab to view the ports used for each tool.
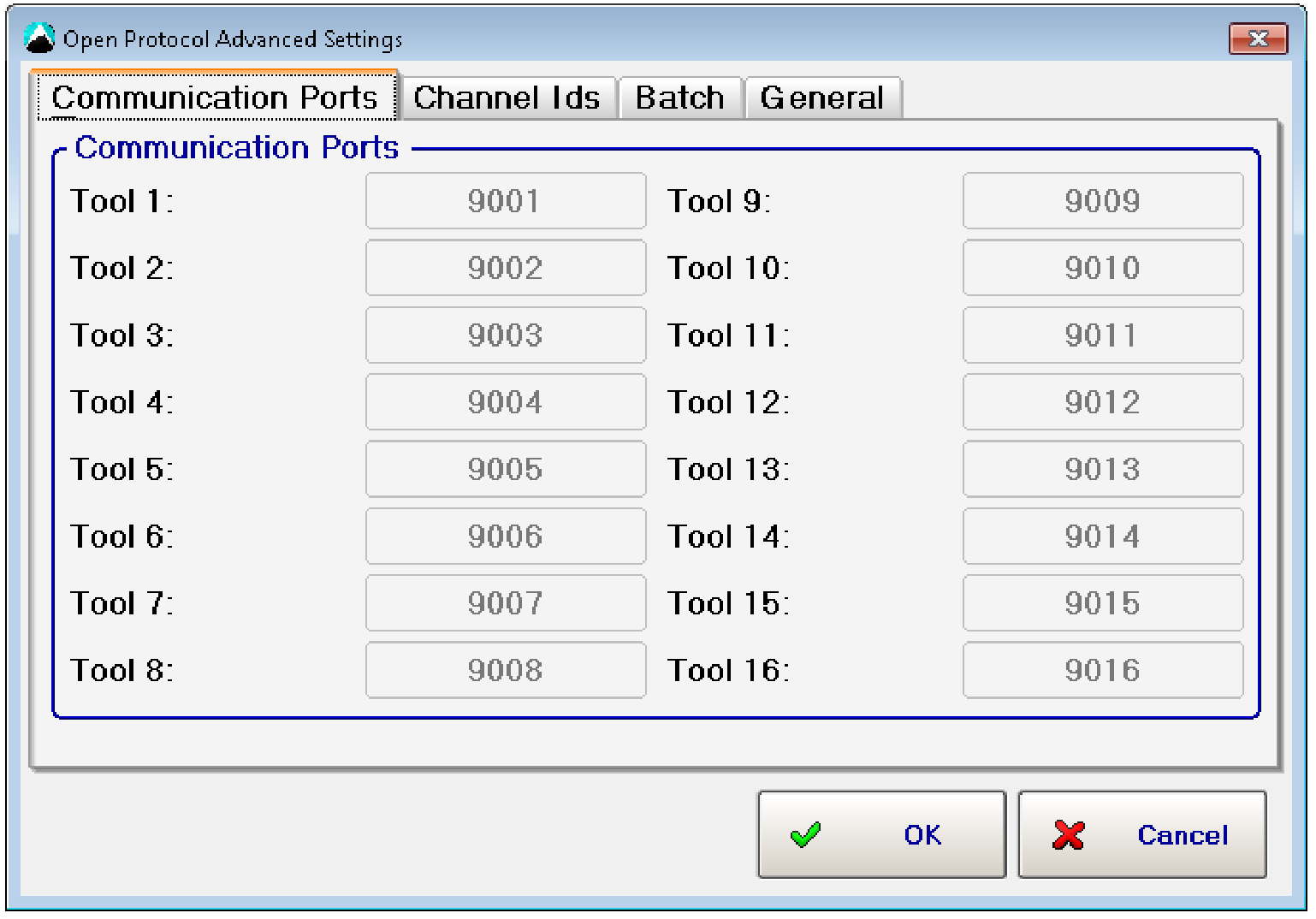
Each tool will have its own TCP port. The first port is able to be set and the other ports are assigned automatically.
Notes for the Desoutter Industrial Smart Hub Connect
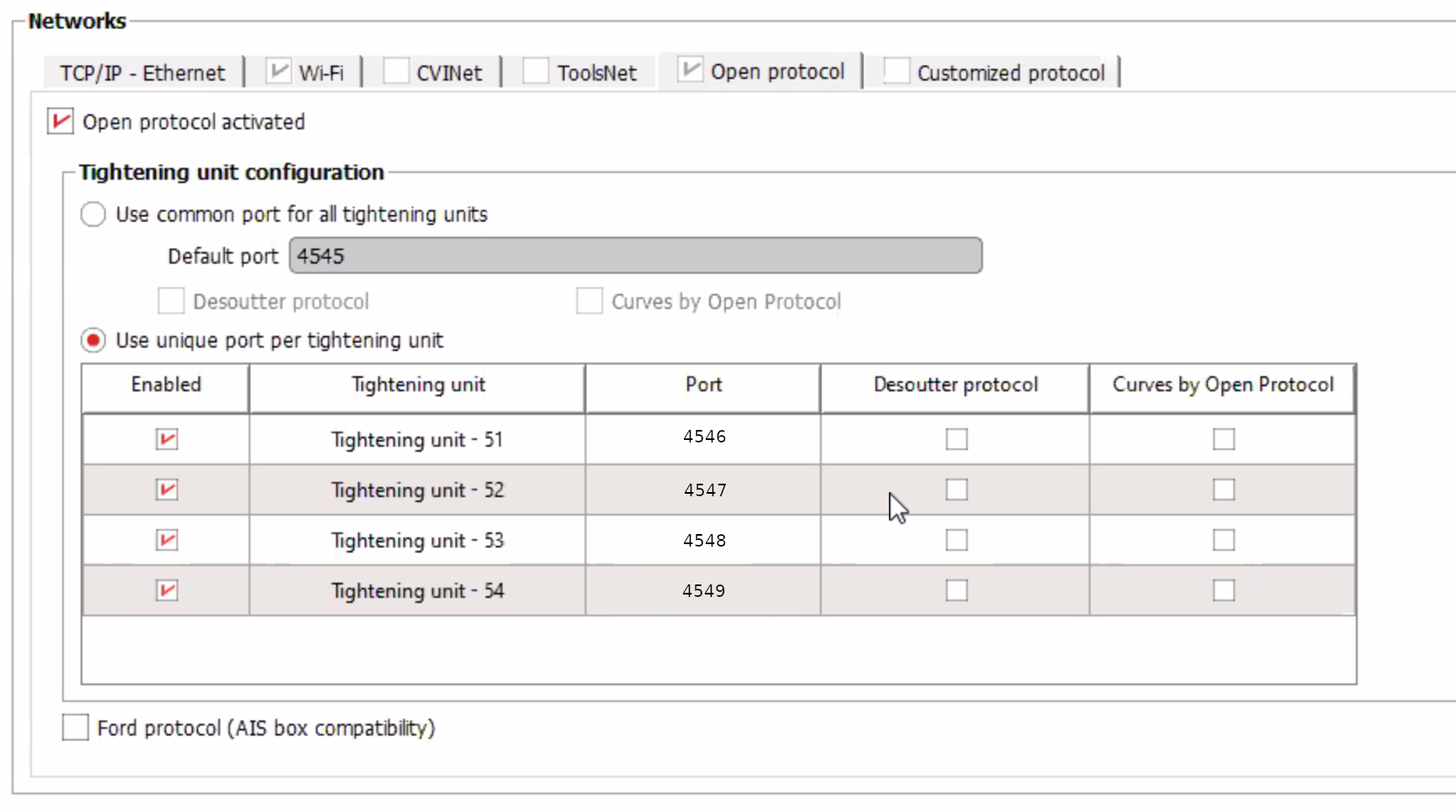
To use your Desoutter tools with Tulip, you will need to enable Open Protocol on the "Network" tab for your controller as shown below.
You will also need to set Open Protocol as the "Default Pset selection source" for the "Running mode" of each torque tool.
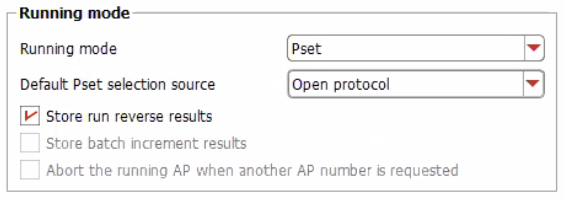
Note that the tool does not output data when being run in reverse.
Was this article helpful?