To download the app, visit: Library
This article explains how to gather data from Universal Robots (UR) using a Tulip App
Purpose
Automation solutions are becoming increasingly prevalent in industry. The solutions are also becoming more and more complex but the general theory remains the same – to undertake manual, repetitive tasks with high speed and/or low error rates, releasing human front-line workers to focus on the more interesting and challenging work that they enjoy. In this respect, automation solutions can be seen as a similar process to Tulip‘s aim of mapping front-line manual processes.
In order to support this - in coopeartion with Techinicon - the Universal Robots Monitoring App has been created which gathers data from Universal Robots of all models.
Getting Started with Technicon and Universal robots
There are several different ways to get data into this App using Tulip APIs or even an OPC UA solution from an existing MES. However, it is also possible to use the Technicon Gateway to collect information from the robot's operation and forward it to Tulip.
The Technicon Gateway offers a seamless way of connecting to a Universal Robot just by configuring the device - without the need to connect the robot itself to the internet or install new software that could break or impede an existing solution design. Data can be sent wirelessly or via mobile network. Technicon has a lot of experience in using this gateway with their core technologies of Universal Robots, Fanuc Robots, Beckhoff PLCs and Siemens PLCs.
Tulip Integration Setup
Tulip's Machine Monitoring API
Machine Monitoring in Tulip offers an easy-to-use Interface to display the current state of a machine. A machine of type Universal Robot is included in the app that contains all 38 standard attributes that exist on all models of Universal robots (such as running, stopped, paused, temperatures and currents of individual robot joints).
Tulip's Table API
The App is using several custom tables that can collect Universal robot attributes, states and events being logged. These tables will automatically be created by Importing the App to your Tulip Instance.
Device Register is for defining your robots manually, including assigning the unique Machine API Table ID. This link is necessary for the APIs to function.
UR Log allows the collection of all standard 38 attributes as a single table row, so state at a given moment can be analysed (eg temperature of a joint versus the current).
Attribute Log allows the collection of custom attributes you may wish to define yourself for collection eg. Robot program variables
Event Log allows the collection of custom events you may wish to define and analyse. Eg. “PauseButtonPressed”
How it works
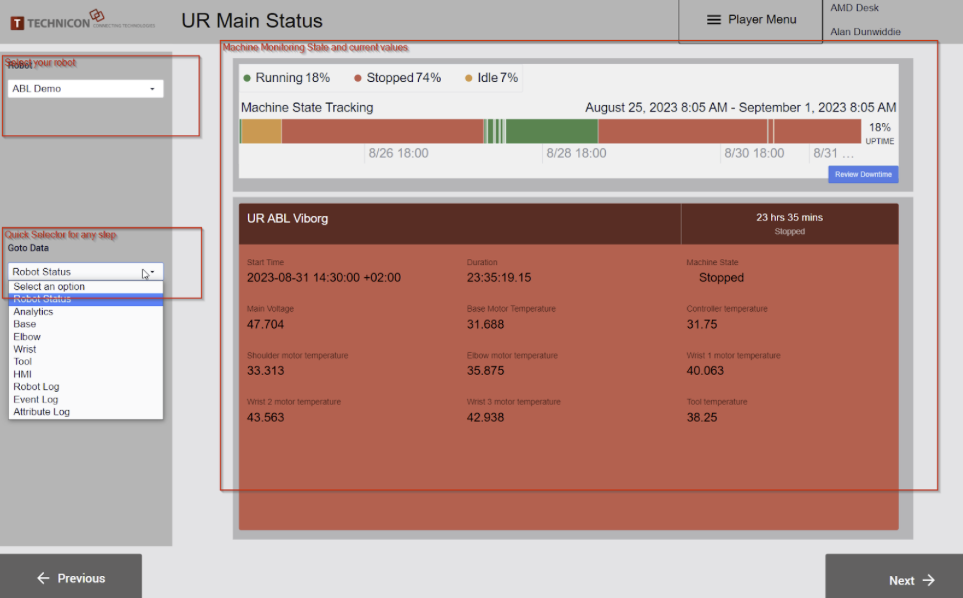
The Functional Example has five steps - each with a set of functionalities to showcase different aspects of the integration between Tulip and UR. Select the robot to monitor from the available machines using the Robot menu and use the Goto Data menu to select the step to jump to.
UR Main Status
On this step, the user can see the overal Machine status of the selected robot - using Tulip's native widget to display the available data.
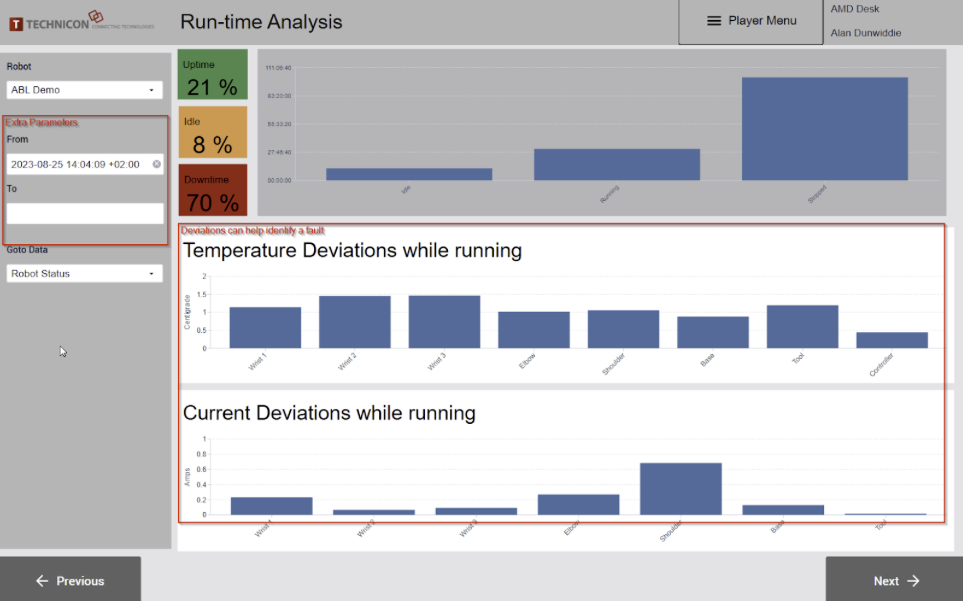
Run-time Analysis
This step shows a run-time analysis of the selected robot for the given timeframe. Use the Date and Time picker to select timeframe for the analysis.
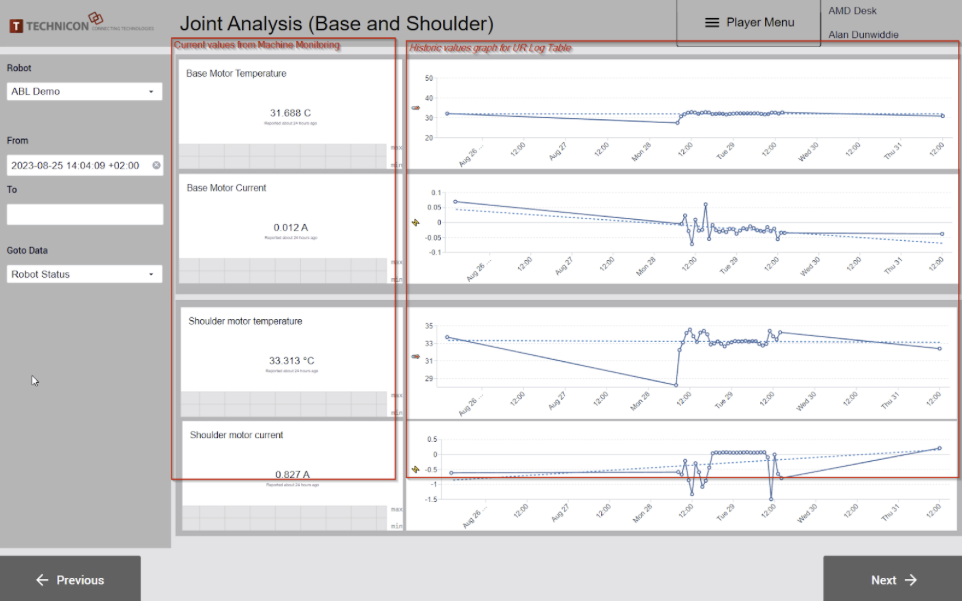
Joint Analysis
This steps helps to monitor core joint (Base and Shoulder) data from the selected robot - displaying both current values and historical readouts on a graph.
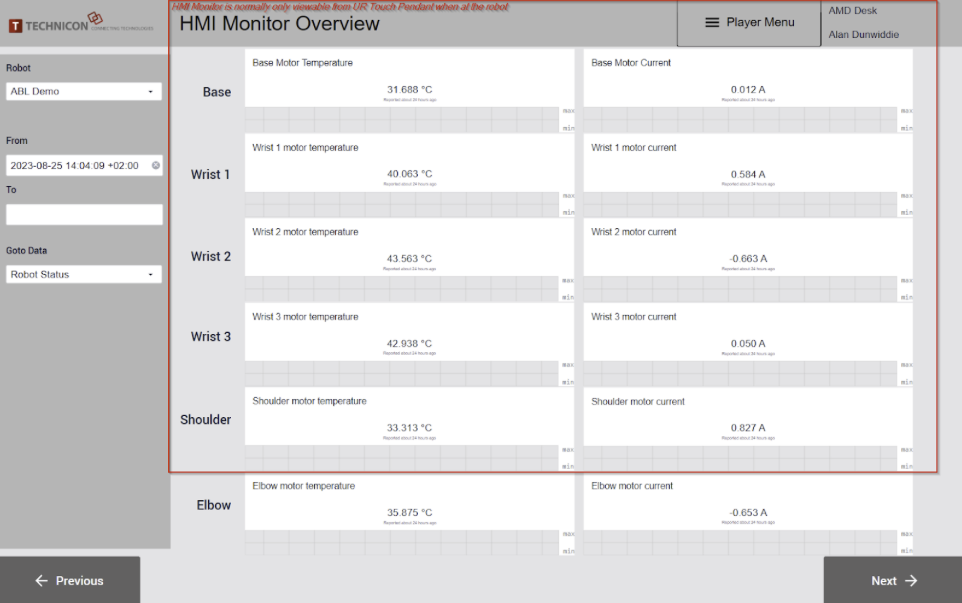
HMI Monitor Overview
The HMI Monitor step shows detailed joint data for each joint of the robot - including motor temerature and current readouts.
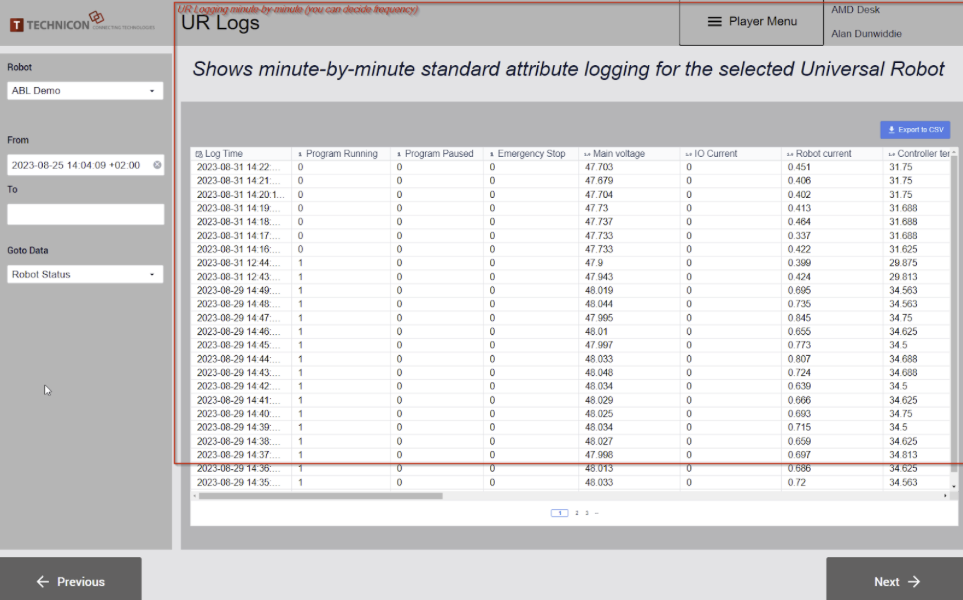
UR Logs
This steps shows logged standard attribute data for the selected robot on a minute-by-minute basis.
The article was written based on the 'Universal Robot Monitoring with Tulip - Why and How Technicians Apply Tulip to Remotely Monitor Universal Robots (2023)' article.